1
Ejercicios sugeridos: Guía 2 “Vectores”
Tema 4: Vectores en R
2
y R
3
Introducción: Los vectores en R
2
y R
3
(o sea vectores de dos y tres componentes) se emplean en todos los
ámbitos de la física para representar diversos fenómenos en disciplinas como mecánica, mecánica de fluidos,
óptica, electricidad y magnetismo, sólo por mencionar algunas.
En este capítulo interpretaremos desde la geometría a los vectores en dos y tres dimensiones y veremos
aplicaciones geométricas de las operaciones definidas entre ellos (en el desarrollo del Tema 2 de Matrices)
que, justamente surgen a partir del significado geométrico de cada operación dando lugar a nuevos
conceptos y fórmulas útiles. También definiremos dos nuevos productos entre vectores de R
3
, deduciendo
sus significados geométricos y algunas aplicaciones.
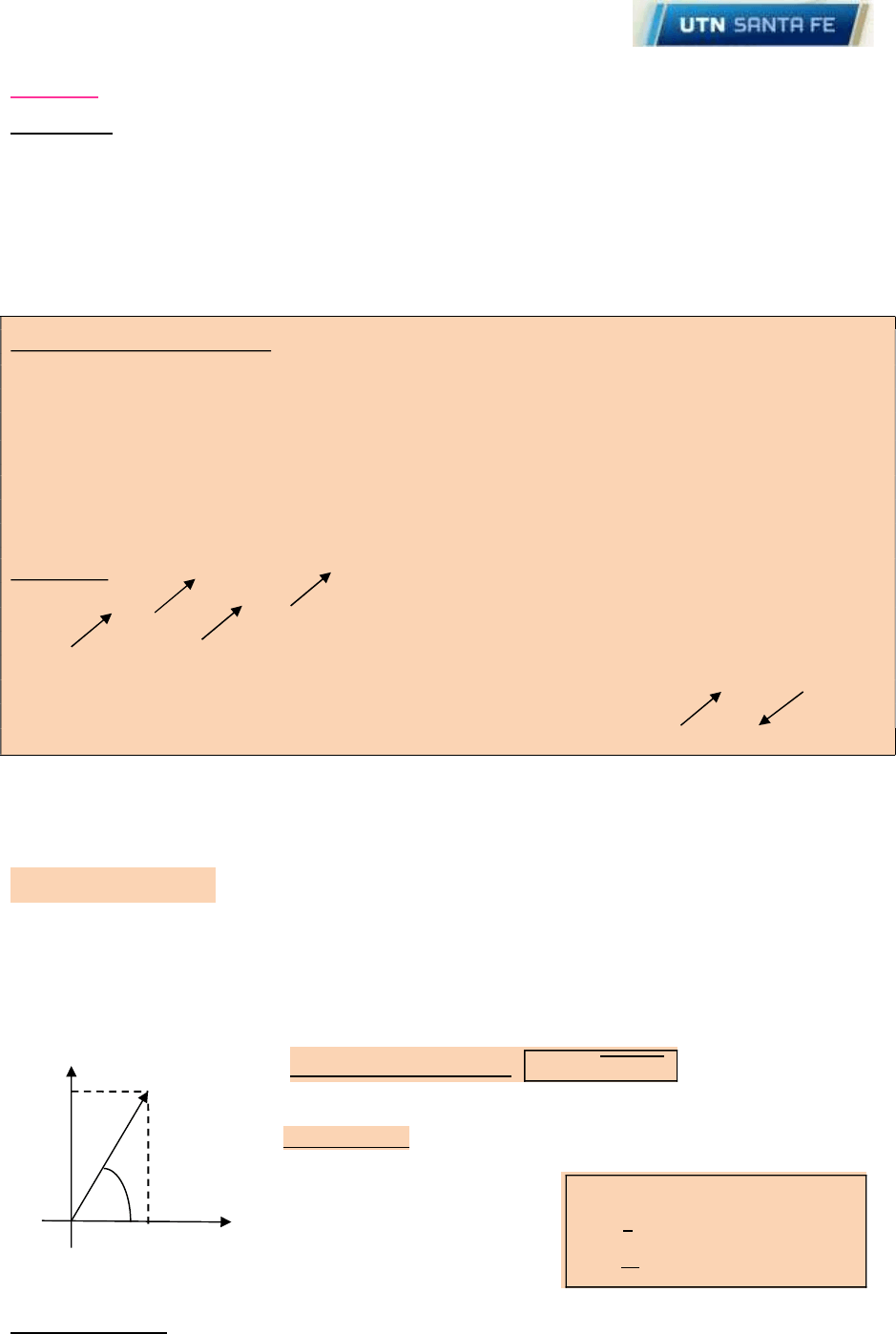
Definición geométrica de vector
En R
2
(o R
3
) todos los segmentos de recta dirigidos que tienen la misma longitud (o magnitud) y la misma
dirección (acá incluimos sentido) se consideran equivalentes y representan una entidad llamada vector.
Denotaremos a un vector con una letra minúscula 𝑣̅ (o 𝑣⃗ ) o con dos mayúsculas 𝑃𝑄
(o 𝑃𝑄
⃗
), en cuyo
caso la primera letra 𝑃 es el punto inicial y 𝑄 el punto final (o extremo) del vector.
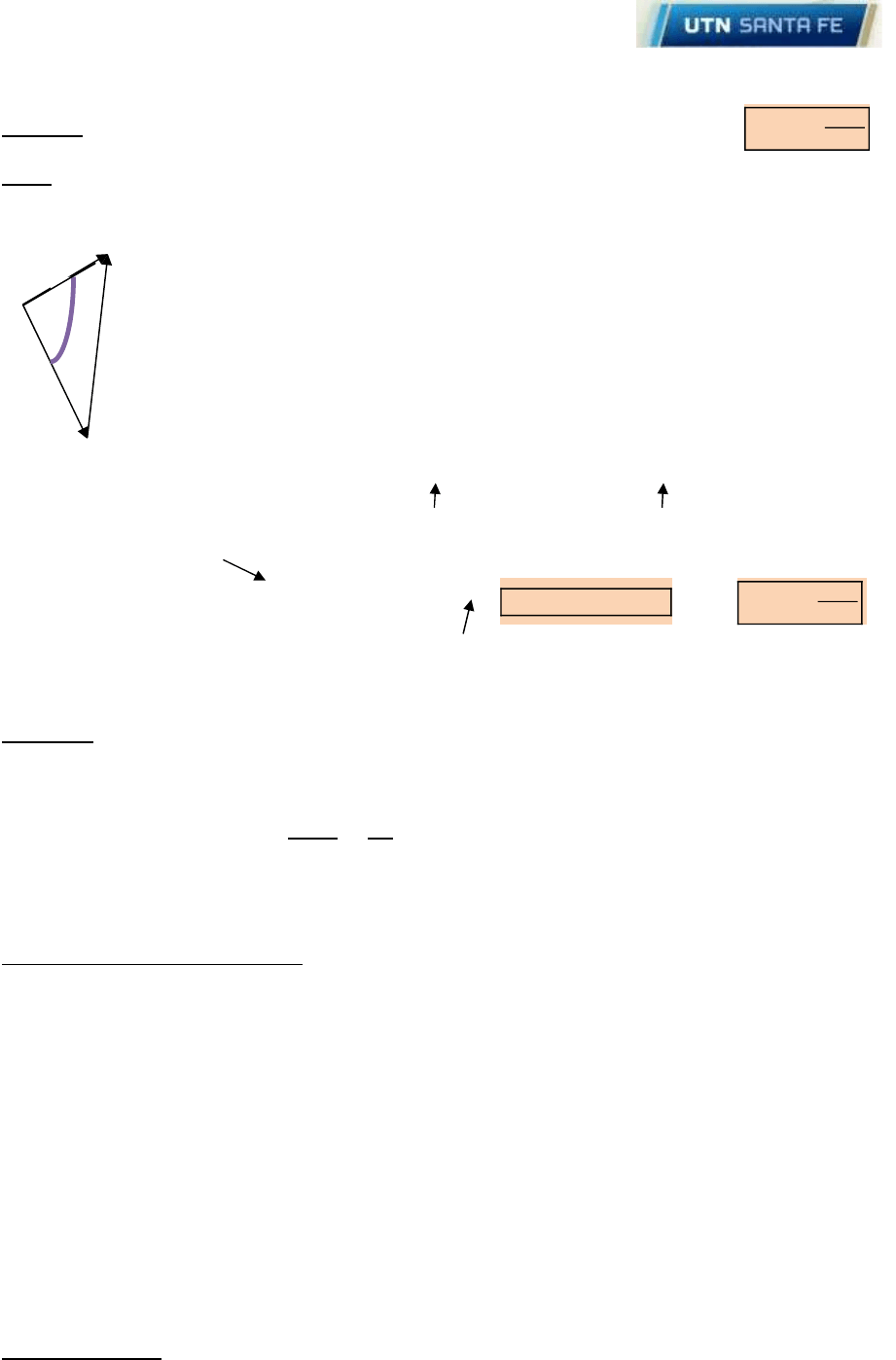
Dado que un vector queda completamente determinado por su magnitud y su dirección, sin “importar” su
punto de aplicación, decimos que los vectores son libres (la “flecha” que representa a un vector puede
trasladarse siempre que conserve su longitud y su dirección)
Por ejemplo: S Q
B 𝑣̅=𝑅𝑆
=𝐴𝐵
=𝑃𝑄
Los cuatro segmentos dirigidos son
𝑣̅ R P equivalentes sin importar dónde se
A localizan respecto al origen.
Q Q
Los vectores 𝑃𝑄
y 𝑄𝑃
son diferentes pues tienen direcciones opuestas:
P P
4.1 Relación entre las componentes de un vector, su módulo y su dirección en R
2
y
R
3
.
De la definición algebraica de vector en 𝑅
como lista ordenada de 𝑛 números (o letras que representan
números) dispuestos en una fila o columna, podemos escribir 𝑅
=
{
(
𝑎 𝑏
)
∶ 𝑎 ,𝑏 ∈𝑅
}
o
𝑹
𝟐
=
𝒂
𝒃
: 𝒂 ,𝒃 ∈𝑹 y como cualquier punto en el plano se escribe como el par ordenado
(
𝑎 ,𝑏
)
es
evidente que se puede establecer una correspondencia (biunívoca) entre vectores de 𝑅
y puntos del plano,
de modo que podemos representar gráficamente en el plano cartesiano al vector 𝒗
=
𝒂
𝒃
como el
segmento dirigido con punto inicial en el origen de coordenadas 𝑂(0,0) y punto final en 𝑃
(
𝑎,𝑏
)
de la
siguiente manera:
Observando este gráfico es fácil deducir que:
𝑦 Magnitud o Módulo de 𝒗
∶
|
𝑣̅
|
=
√
𝑎
+ 𝑏
(Teorema de Pitágoras)
𝑏 𝑃
(
𝑎,𝑏
)
𝒗
Dirección de 𝒗
, se define como el ángulo 𝜃 que forma 𝑣̅ con el lado
𝑂
𝜃
𝑎 𝑥 positivo del eje 𝑥 (o semieje 𝑥
) : 𝜃=
⎩
⎪
⎨
⎪
⎧
tan
𝑏
𝑎
si 𝑎≠0
cuando 𝑎=0 y 𝑏>0
cuando 𝑎=0 y 𝑏<0
2
Ejercicios sugeridos: Guía 2 “Vectores”
Nota: Dado que 𝑣̅ = 𝑂𝑃
, 𝑣̅ se llama vector posición del punto 𝑃
(
𝑎,𝑏
)
.
En muchos casos, como suele ocurrir en física al trabajar con fuerzas, no se dan las componentes de los
vectores sino su magnitud y el ángulo con el que la fuerza está aplicada. En estos casos para determinar los
valores de las coordenadas 𝑎 y 𝑏 volvemos a observar el gráfico anterior y a partir de las correspondientes
relaciones trigonométricas en el triángulo rectángulo, notamos que:
cos𝜃=
|
|
←
y
sen 𝜃=
|
|
←
⇒
𝑎=
|
𝑣̅
|
cos𝜃
𝑏=
|
𝑣̅
|
sen𝜃
𝒗
=
𝑎
𝑏
=
|
𝑣̅
|
cos𝜃
sen𝜃
con
0≤𝜃<2𝜋
o
0°≤𝜃<360°
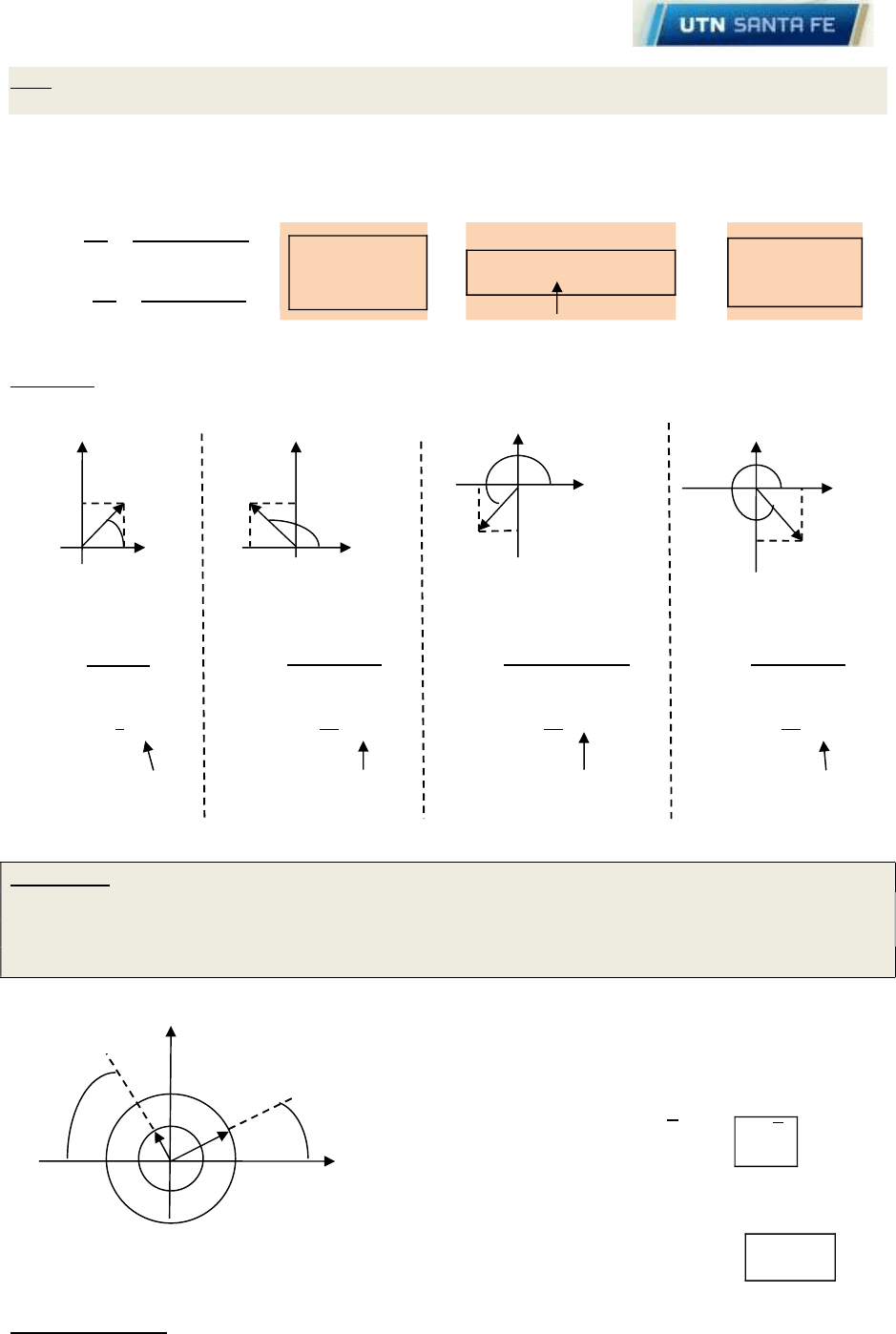
EJEMPLO 1: a) Módulo y dirección de un vector conocidas sus componentes.
𝑦
𝑦
𝑦
𝑦
-1 1
1 𝒗
𝒖
1 𝑥
𝑥
𝒘
-1
𝑥
-1 𝑥
-1 𝒛
𝒗
=
1
1
𝒖
=
−1
1
𝒘=
−1
−1
𝒛=
1
− 1
|
𝑣̅
|
=
√
1
+ 1
=1
|
𝑢
|
=(−1)
+ 1
=1
|
𝑤
|
=(−1)
+ (−1)
=1
|
𝑧̅
|
=1
+ (−1)
=1
𝜃
=tan
=45° 𝜃
=tan
=135° 𝜃
=tan
=225° 𝜃
=tan
= 315°
Con calculadora 135 = −45 +180 pues 225 = 45 +180 pues 315 =− 45 +360 pues por
𝑢∈ 2º Cuadrante 𝑤∈ 3º Cuadrante convenio 0≤𝜃<360
Advertencia: Antes de dar como dirección de un vector en R
2
al ángulo que entrega la calculadora , es
preciso controlar si el mismo corresponde al cuadrante en el cual se encuentra la representación gráfica del
vector cuando su punto inicial es el origen de coordenadas y, de no serlo hay que sumar 180° (o 𝜋) si se está
usando grados sexagesimales (o radianes).
b) Componentes de un vector si se conoce su módulo y su dirección.
𝟒 Asumiendo que las circunferencias son de radio 4 y 2, entonces
70° 𝒗
30° obtenemos 𝒗
=
4cos30°
4sin30°
=
4.
√
3
/2
4.1/2
=
2
√
3
2
.
2 Sea 𝑢 el otro vector que es radio de la circunferencia menor de
radio 2, notamos que la dirección de 𝑢 , 𝜃
= 180° − 70°=110° ⇒ 𝑢=
2cos110°
2sen110°
=
−0,684
1,88
------------------------------------------------
3
Ejercicios sugeridos: Guía 2 “Vectores”
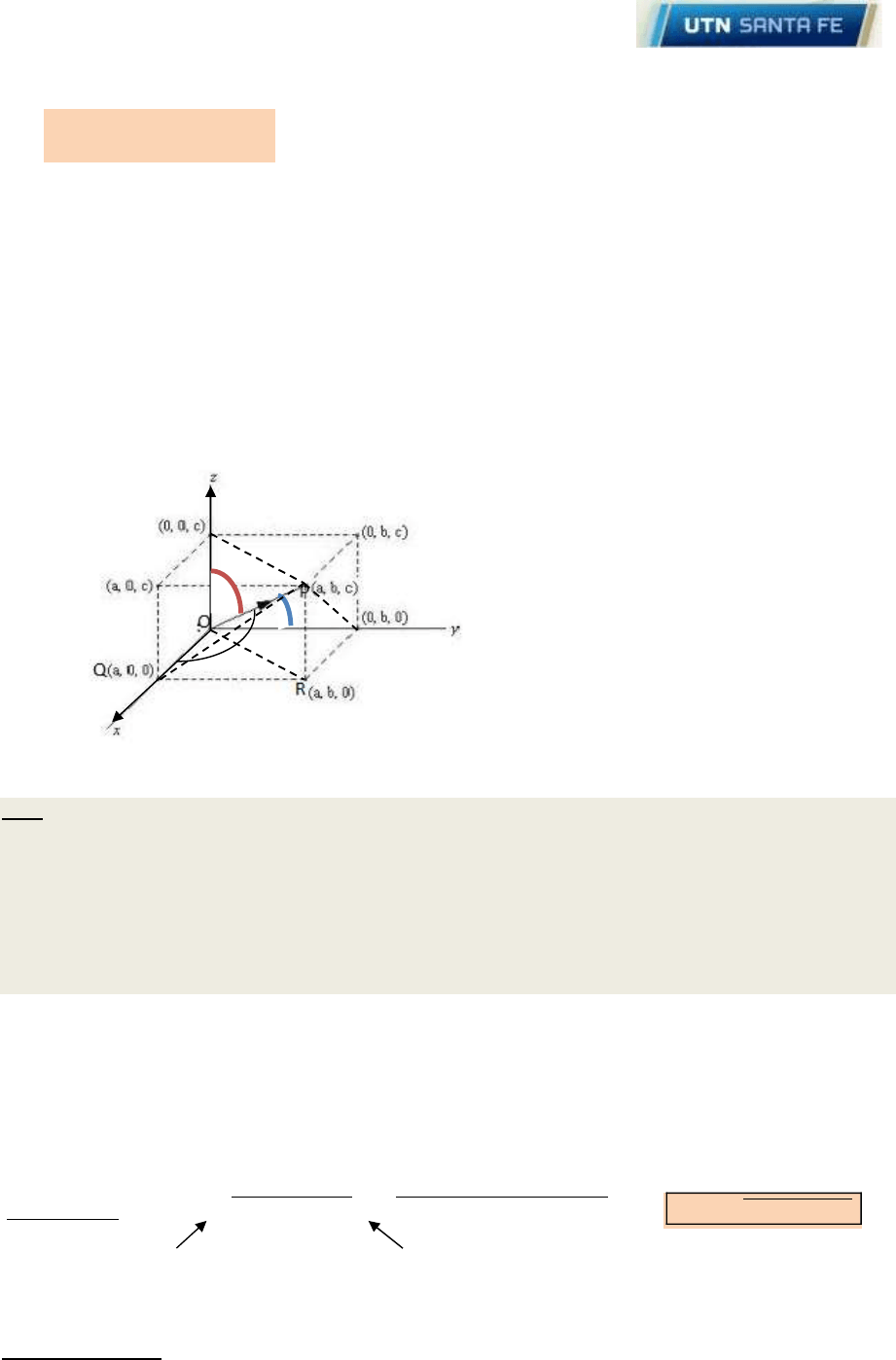
Veamos ahora cómo graficar un vector en R
3
y cómo deducir su módulo y dirección:
Sea 𝑹
𝟑
=
𝒂
𝒃
𝒄
: 𝒂 ,𝒃,𝒄 ∈𝑹 . La correspondencia que debemos hacer ahora es entre vectores en 𝑅
y
puntos del espacio (euclídeo) tridimensional que se representan por medio de ternas ordenadas
(
𝑎,𝑏,𝑐
)
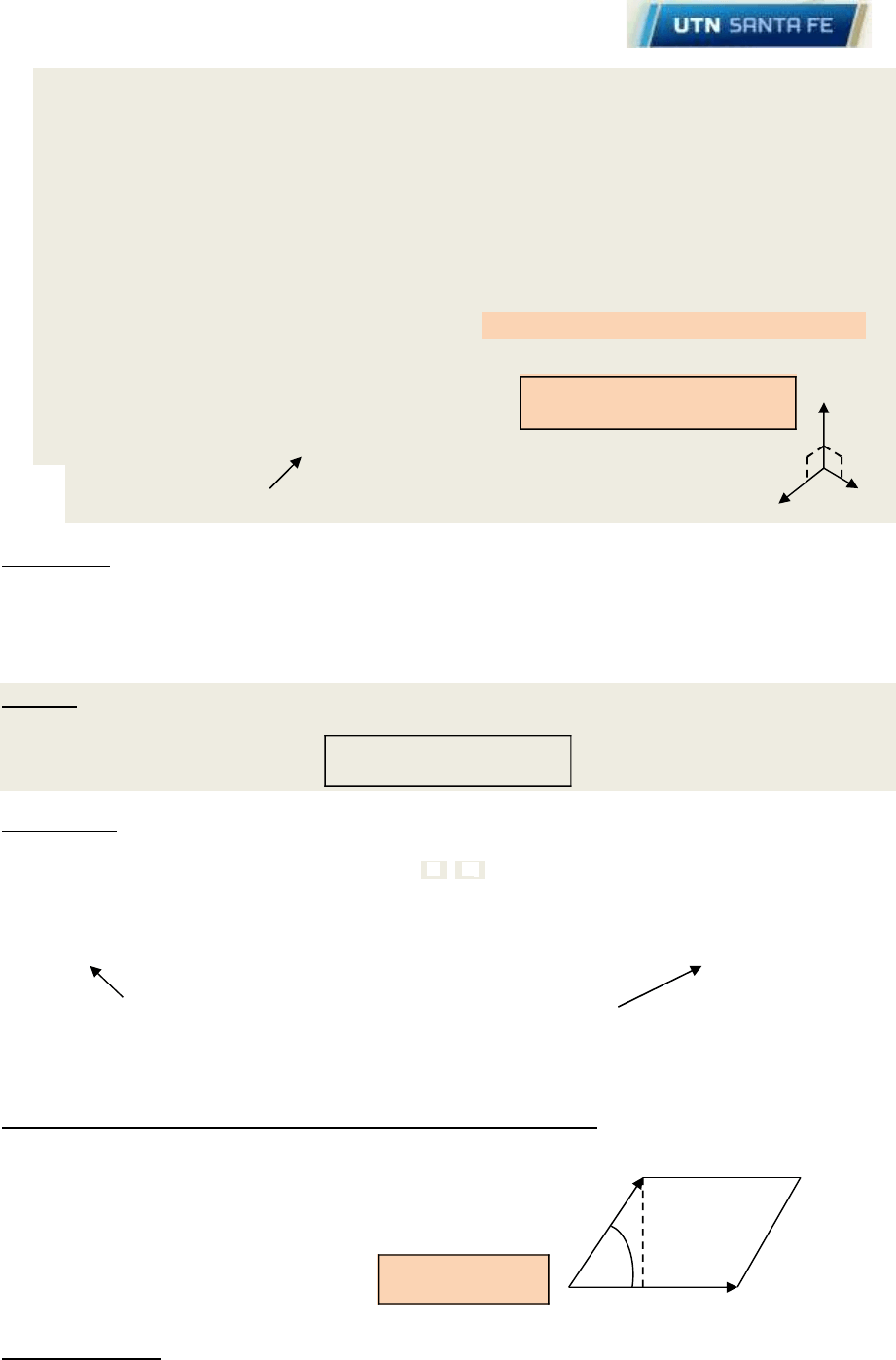
donde 𝑎 se llama abscisa, 𝑏 ordenada, 𝑐 cota e indican por ejemplo, ancho, largo y altura.
Para representar un punto en el espacio, a partir de un punto llamado origen (denotado por O) se dibujan
tres rectas perpendiculares entre sí (que serán los tres ejes coordenados), a las que se llama eje 𝒙 , eje 𝒚 y
eje 𝒛 eligiendo sobre cada uno una dirección positiva. La forma más común es la que tiene al eje 𝑥 y al
eje 𝑦 horizontales y al eje 𝑧 vertical. Las flechas en los ejes indican la dirección positiva de cada uno y los
valores de las coordenadas 𝑎,𝑏,𝑐 se toman sobre los ejes 𝑥,𝑦,𝑧 respectivamente como muestra la figura
que sigue (suponiendo que 𝑎,𝑏,𝑐>0) donde además dibujamos un prisma rectangular de aristas 𝑎,𝑏,𝑐
cuya diagonal desde el origen hasta P
(
𝑎,𝑏,𝑐
)
es el vector posición de dicho punto . Es decir 𝑣̅ = 𝑂𝑃
=
𝑎
𝑏
𝑐
.
Nota: Por la forma en que están dispuestos los ejes coordenados en el gráfico, nuestro sistema se denomina
sistema derecho pues satisface la regla de la mano derecha (si se coloca la mano derecha de manera que el
dedo índice señale en la dirección positiva del eje x mientras que el medio apunta en la dirección positiva del
eje y, entonces el pulgar apuntará en la dirección positiva del eje z). Generalmente usaremos sistemas
derechos en las representaciones gráficas que hagamos en 𝑅
. Los ejes coordenados determinan tres planos
coordenados que (según los ejes que los determinan) se denominan plano 𝒙𝒚 (el que contiene la base del
prisma), plano 𝒙𝒛 (el que contiene la cara lateral izquierda del prisma) y plano 𝒚𝒛 (el que contiene la cara
posterior del prisma).
Observando el prisma de la figura vemos que el punto P queda determinado por la intersección de los
siguientes tres planos: plano que contiene la cara frontal del prisma (perpendicular al eje x y paralelo al
plano yz), plano que contiene la cara lateral derecha (paralelo al plano xz y perpendicular al eje y ) y plano
que contiene la cara superior (perpendicular al eje z y paralelo al plano xy).
Por lo tanto 𝑂𝑃
es la hipotenusa del triángulo rectángulo ORP (con ángulo recto en R) y que 𝑂𝑅
es
hipotenusa del triángulo rectángulo OQR (con ángulo recto en Q). Entonces podemos deducir:
Módulo de 𝒗
:
|
𝑂𝑃
|
=
|
𝐎𝐑
|
𝟐
+
|
RP
|
=
(
|
𝐎𝐐
|
𝟐
+
|
𝐐𝐑
|
𝟐
) +
|
RP
|
|
𝑣̅
|
=
√
𝑎
+ 𝑏
+ 𝑐
Teo de Pitágoras Teo Pitágoras
en ORP (hipotenusa 𝑂𝑃
) en OQR (hipotenusa 𝐎𝐑
)
4
Ejercicios sugeridos: Guía 2 “Vectores”
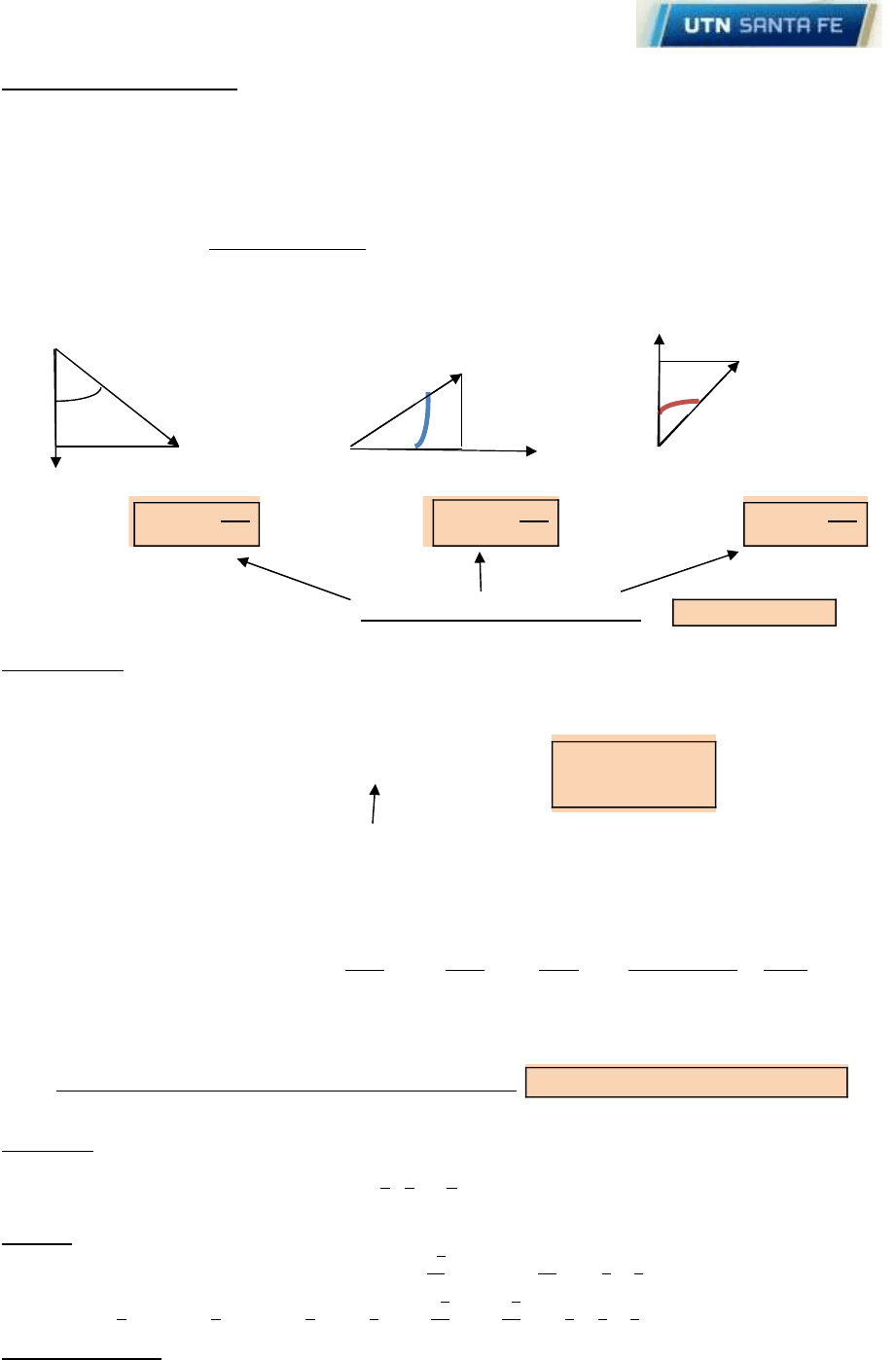
Dirección de un vector en R
3
: Es evidente que no se puede determinar un único vector 𝑣̅ en el espacio R
3
si
sólo se conoce el ángulo 𝜶 que forma con el eje positivo de las x (ya que podría ser cualquier vector sobre un
“semicono” con eje de simetría coincidente con el eje x
+
) tampoco alcanza con conocer además el ángulo
𝜷
que forma 𝑣̅ con el eje positivo de las y (ya que quedarían dos posibles vectores: uno en el semiespacio
superior, donde z > 0, y el otro en el semiespacio inferior, donde z <0 ). Por lo cual queda claro se deben
conocer los tres ángulos que el vector 𝑣̅ forma con cado uno de los semiejes coordenados positivos de R
3
.
Estos ángulos se llaman ángulos directores y se denotan con 𝜶
(
alfa
)
, 𝜷
(
beta
)
, 𝜸 (gama). Los vamos a
deducir en términos de las componentes del vector 𝑣̅ y de su módulo a partir de relaciones trigonométricas
en tres “convenientes” triángulos rectángulos incluidos en nuestro prisma (ver figura anterior y siguientes)
O(0,0,0) 𝒛
P(𝑎,b,c) S(0,0,c) P(𝑎, b,c)
𝜶
𝒗
𝒗
𝜸 𝒗
Q(0,0,𝑎) P(𝑎,b,c) O(0,0,0)
𝜷
T(0,b,0) O(0,0,0)
𝒙
𝒚
𝜶= QO
P ⇒ cos𝛼=
|
|
𝜷= TO
P ⇒ cos𝛽=
|
|
𝜸= SO
P⇒ cos𝛾=
|
|
Se llaman cosenos directores del vector
𝒗
y 𝟎≤𝜶 ,𝜷 ,𝜸≤𝝅
Consecuencias:
Despejando las componentes 𝑎,𝑏,𝑐 de las fórmulas de los cosenos directores, resulta que
𝑣̅=
𝑎
𝑏
𝑐
=
|
𝑣̅
|
.cos𝛼
|
𝑣̅
|
.cos
𝛽
|
𝑣̅
|
.cos𝛾
=
|
𝑣̅
|
cos𝛼
cos
𝛽
cos𝛾
⇒ 𝑣̅=
|
𝑣̅
|
cos𝛼
cos
𝛽
cos𝛾
por definición de multiplicación
por un escalar
La suma de los cuadrados de los cosenos directores de cualquier vector es 1. En efecto,
(
cos
𝛼
)
+
(
cos
𝛽
)
+
(
cos𝛾
)
=
𝑎
|
𝑣
|
+
𝑏
|
𝑣
|
+
𝑐
|
𝑣
|
=
𝑎
+ 𝑏
+ 𝑐
|
𝑣
|
=
|
𝑣
|
|
𝑣
|
=1
Este resultado, que es necesario para resolver algunos ejercicios y problemas se conoce como,
Propiedad fundamental de los cosenos directores de 𝒗
(
cos
𝛼
)
+
(
cos
𝛽
)
+
(
cos𝛾
)
=1
EJEMPLO 2 : Decidir si existe un vector en el espacio que tenga los siguientes ángulos directores.
a) 30° , 90° y 120° b)
𝝅
𝟑
,
𝝅
𝟒
y
𝝅
𝟒
Solución: En cada caso se debe ver si los ángulos dados satisfacen o no la propiedad fundamental
a)
(
cos30°
)
+
(
cos90°
)
+
(
cos120°
)
=
√
+ 0 +
=
+
=1 . Rta: Sí existe.
b) cos
𝝅
𝟑
+ cos
𝝅
𝟒
+ cos
𝝅
𝟒
=
+
√
+
√
=
+
+
≠1 . Rta: No existe.
5
Ejercicios sugeridos: Guía 2 “Vectores”
EJEMPLO 3: Hallar los vectores de R
3
de módulo 2 que se encuentran en el plano coordenado xy y forman
un ángulo de 60° con el lado positivo del eje x.
Solución:
¿𝑣̅=
𝑎
𝑏
𝑐
? tal que
|
𝑣̅
|
=2 , 𝛾=90° (pues 𝑣̅ está en el pl xy) y 𝛼=60°. Entonces usamos
la propiedad fundamental para hallar el coseno director de
𝛽,
(
cos60°
)
+
(
cos
𝛽
)
+
(
cos90°
)
=1.
De donde cos
𝛽
=±
1 −
= ±
√
⇒
𝑎
𝑏
𝑐
=
|
𝑣̅
|
.cos𝛼
|
𝑣̅
|
.cos
𝛽
|
𝑣̅
|
.cos𝛾
=
⎝
⎜
⎛
2
2
±
√
2(0)
⎠
⎟
⎞
𝑣̅=
1
±
√
3
0
cos 60° =
y cos 90°=0 Ver las fórmulas de los cosenos directores y su consecuencia
----------------------------------------
4.2- Significado geométrico de la multiplicación por un escalar en R
2
y R
3
.
¿Qué efecto geométrico tiene multiplicar un vector (de R
2
o R
3
) por un número? Si tenemos que calcular el
doble o triple de un vector es fácil intuir que su módulo se va a duplicar o triplicar (respectivamente) y si
tuviéramos que hallar la mitad de un vector (o sea multiplicarlo por ½), su módulo se reducirá a la mitad. A
esto lo podemos demostrar para cualquier escalar :
Si 𝛼∈𝑅 y 𝑣̅ ∈ 𝑅
(
𝑜 𝑅
)
⇒
|
𝛼𝑣
|
=
(
𝛼𝑎
)
+
(
𝛼𝑏
)
+
(
𝛼𝑐
)
=
√
𝛼
𝑎
+ 𝛼
𝑏
+ 𝛼
𝑐
=
Si 𝑣̅ ∈𝑅
=
𝛼
(
𝑎
+ 𝑏
+ 𝑐
)
=√𝛼
√
𝑎
+ 𝑏
+ 𝑐
=
|
𝛼
|
.
|
𝑣̅
|
|
𝛼𝑣
|
=
|
𝛼
|
|
𝑣̅
|
que se lee “ módulo de 𝛼𝑣 es igual al valor absoluto de 𝛼 por el módulo de 𝑣 "
Esta fórmula, que usaremos muchísimo, también nos dice que si multiplicamos a un vector por (– 2) o por
(– 3) o por (– ½ ), su módulo también se duplica o triplica o se reduce a la mitad. Aunque veremos que su
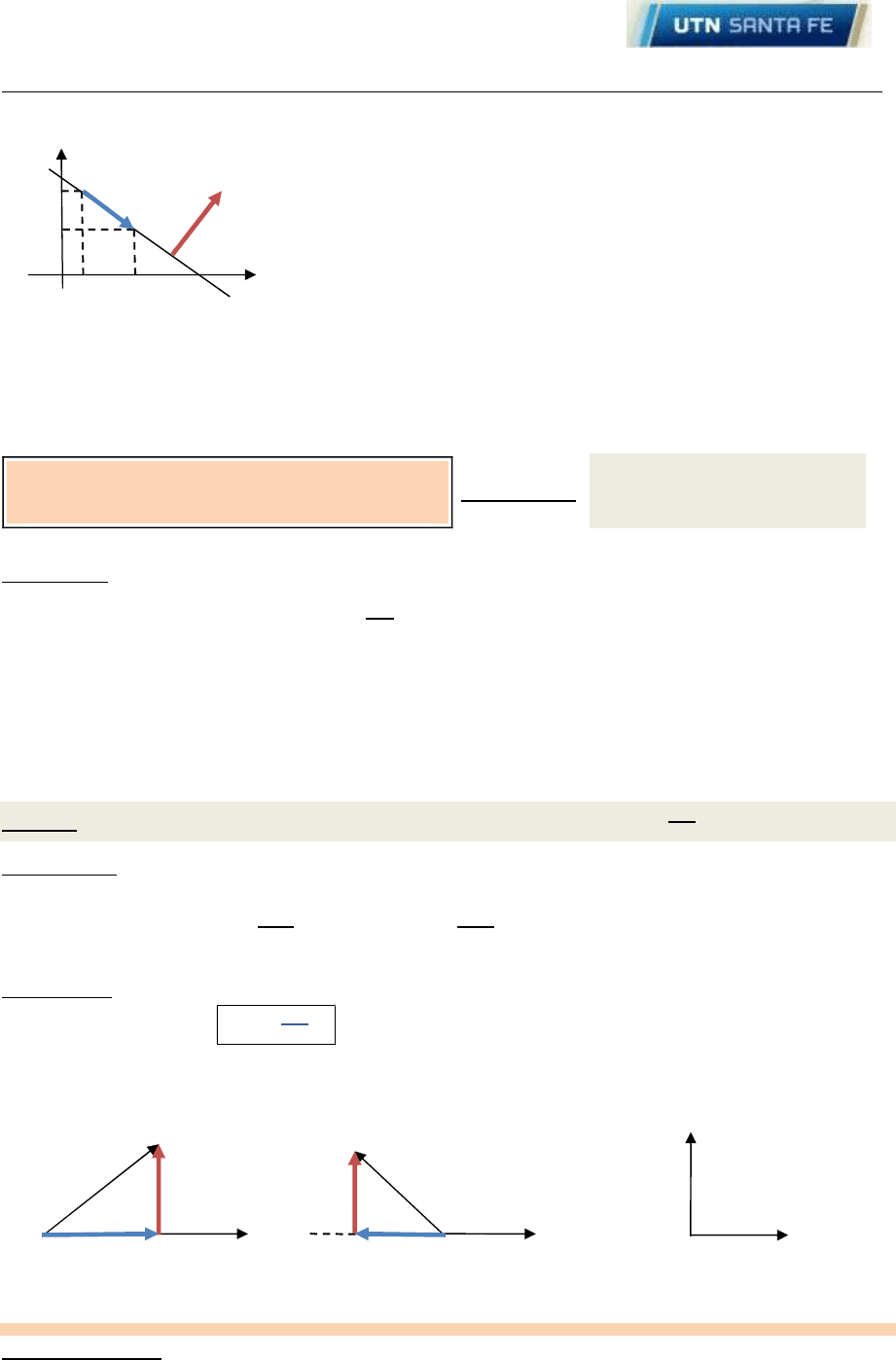
dirección cambia cuando 𝛼 es negativo:
Dirección de 𝛼𝑣 =
Dirección de 𝑣 , 𝑠𝑖 𝛼>0
π + Dirección de 𝑣 , 𝑠𝑖 𝛼<0
𝑣 𝛼𝑣 , 𝛼>0 𝛼𝑣 , 𝛼<0
Observación: La interpretación geométrica de esta operación nos permite formular el siguiente resultado
que más adelante demostraremos “Dos vectores son paralelos si y sólo si uno es múltiplo escalar del otro”.
EJEMPLO 4 : En cada caso graficar los vectores y verificar analíticamente sus direcciones y módulos.
a)
6
3
y
−4
−2
son paralelos con direcciones opuestas pues
6
3
=−
−4
−2
y −
<0. Y
6
3
=
−4
−2
.
b)
3
0
3
y
5
0
5
son paralelos y de igual dirección pues
3
0
3
=
5
0
5
y
>0. Además
3
0
3
=
5
0
5
.
Teorema: Dos vectores no nulos 𝑢,𝑣̅ ∈𝑅
(
𝑜 𝑅
)
son paralelos si y sólo si 𝑢 =𝛼𝑣 para alguna constante 𝛼.
6
Ejercicios sugeridos: Guía 2 “Vectores”
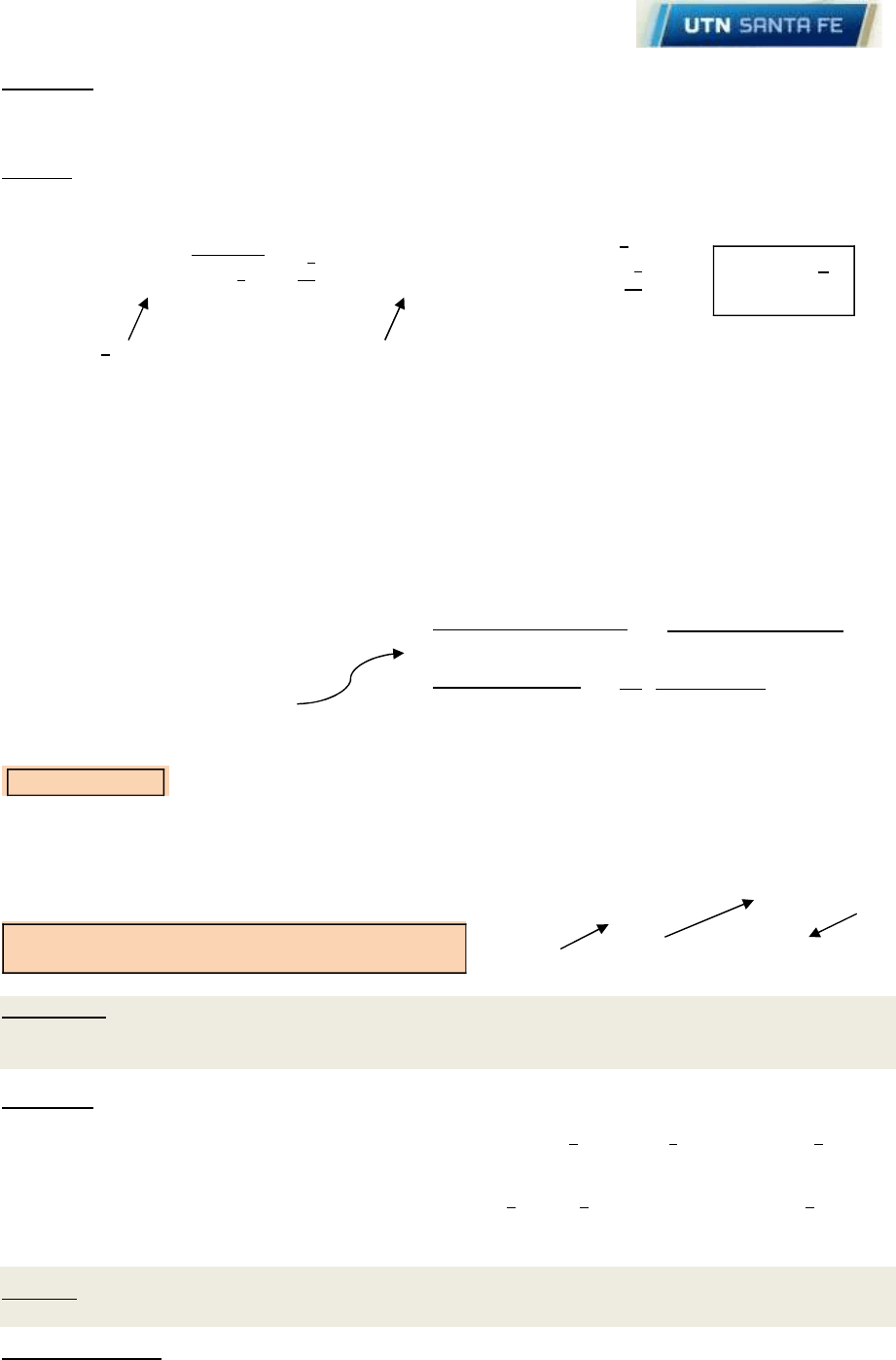
4.3- Significado geométrico de la suma y resta de vectores en R
2
y R
3
.
Analicemos la suma en R
2
para cualquier par de vectores, 𝑢= (𝑢
; 𝑢
) y 𝑣̅=
(
𝑣
;𝑣
)
, que por simplicidad
ubicamos en el primer cuadrante y aplicados en el origen de coordenadas
𝑢
+ 𝑣
Regla del paralelogramo
𝑣̅ 𝑢+ 𝑣̅ 𝑢+ 𝑣̅ : diagonal del paralelogramo desde el origen 0.
𝑢− 𝑣̅ 𝑢− 𝑣̅ : diagonal que une los extremos de 𝑢 y 𝑣̅ .
𝑢
𝑣̅
0 𝑢
𝑣
𝑢
+ 𝑣
𝑥
De la figura vemos que 𝑢+ 𝑣̅ también se puede obtener trasladando uno de los vectores de manera que
su punto inicial coincida con el extremo del otro, así el vector suma (que no es más que la fuerza resultante
equivalente a 𝑢+ 𝑣̅)tendrá como punto inicial el origen 0 y punto extremo el extremo del vector trasladado.
Además como 𝑢=𝑣̅+
(
𝑢− 𝑣̅
)
, el vector (𝑢− 𝑣̅) es el que hay que sumar a 𝑣̅ para obtener 𝑢. Entonces
la resta entre vectores aplicados en un mismo punto no es más que el vector que une los extremos de
ambos vectores, orientado hacia 𝑢 si la resta es 𝑢− 𝑣̅ y hacia 𝑣̅ si esta es 𝑣̅− 𝑢.
Otro resultado observable conocido como Desigualdad del triángulo (por razones que resultan obvias) es
|
𝑢+ 𝑣̅
|
≤
|
𝑢
|
+
|
𝑣̅
|
¿Cuándo vale la igualdad?
Los resultados anteriores son igualmente válidos en R
3
ya que la suma y resta de vectores tiene la misma
definición en R
n
para todo n.
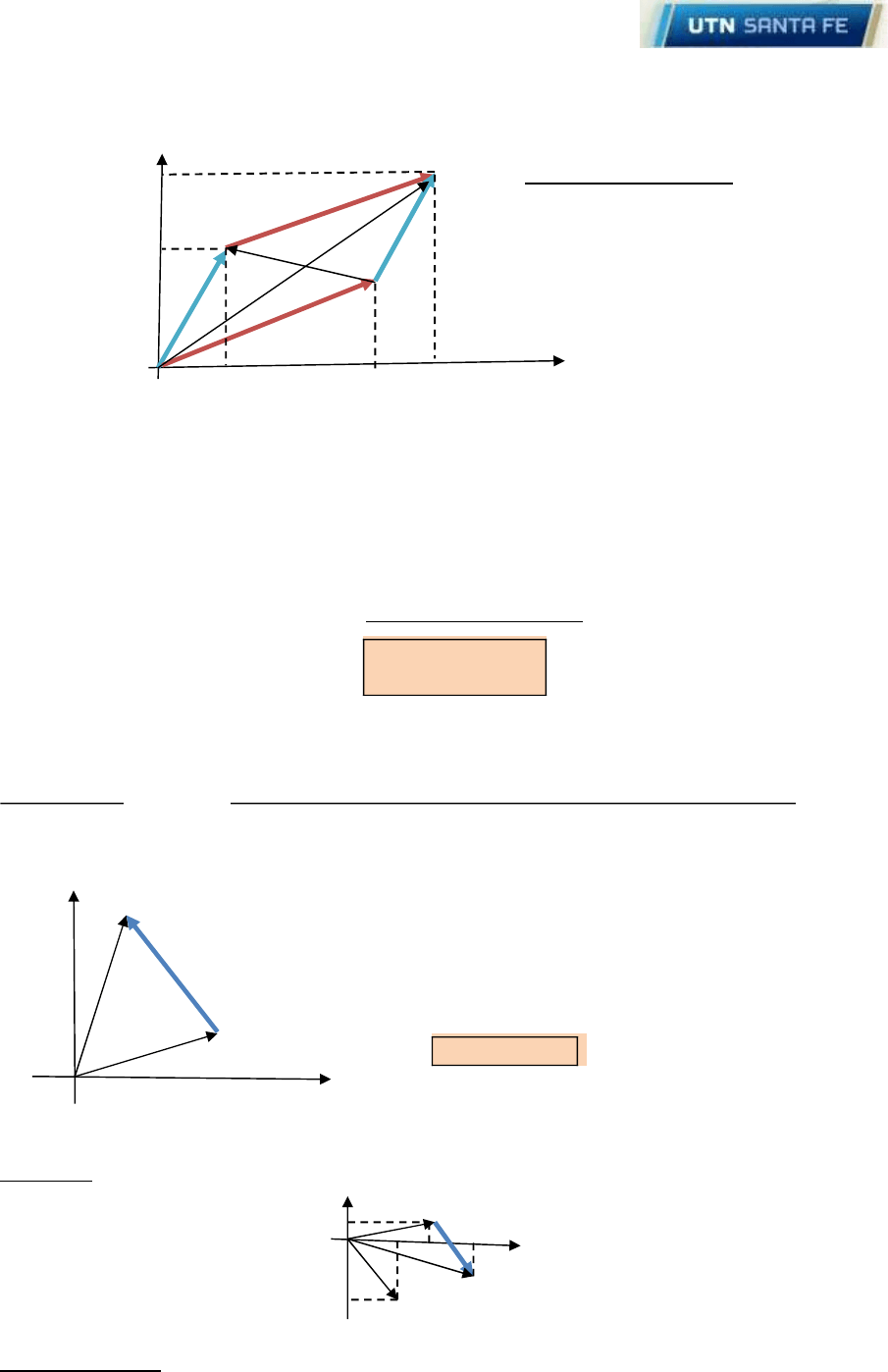
APLICACIONES: (A) Componentes de un vector determinado por dos puntos de R
2
o R
3
.
Analicemos en R
2
. Supongamos que necesitamos determinar las componentes de un vector del cual
conocemos su punto inicial 𝑃(𝑥
,𝑦
) y su punto final 𝑄(𝑥
,𝑦
) .:
y
𝑄(𝑥
, 𝑦
) Notemos que 𝑃𝑄
no es más que el vector que une los extremos
de los vectores posición de los puntos 𝑃
(
𝑥
,𝑦
)
y 𝑄(𝑥
, 𝑦
) ,
por lo que acabamos de ver sobre significado geométrico de la
𝑃(𝑥
, 𝑦
) resta, 𝑃𝑄
= 𝑂𝑄
− 𝑂𝑃
“Punto final – Punto inicial “
O x
Este resultado también válido en R
3
, se usará con mucha frecuencia en deducciones, ejercicios y problemas.
EJEMPLO 5: Si 𝑃(3 ,1) y 𝑄(5,−2) , graficar 𝑃𝑄
calcular sus componentes y compararlas con las del
vector posición de la resta. y
O 2 3 5 x 𝑣̅= 𝑃𝑄
=
5
−2
−
3
1
=
2
−3
-3 𝑣̅
7
Ejercicios sugeridos: Guía 2 “Vectores”
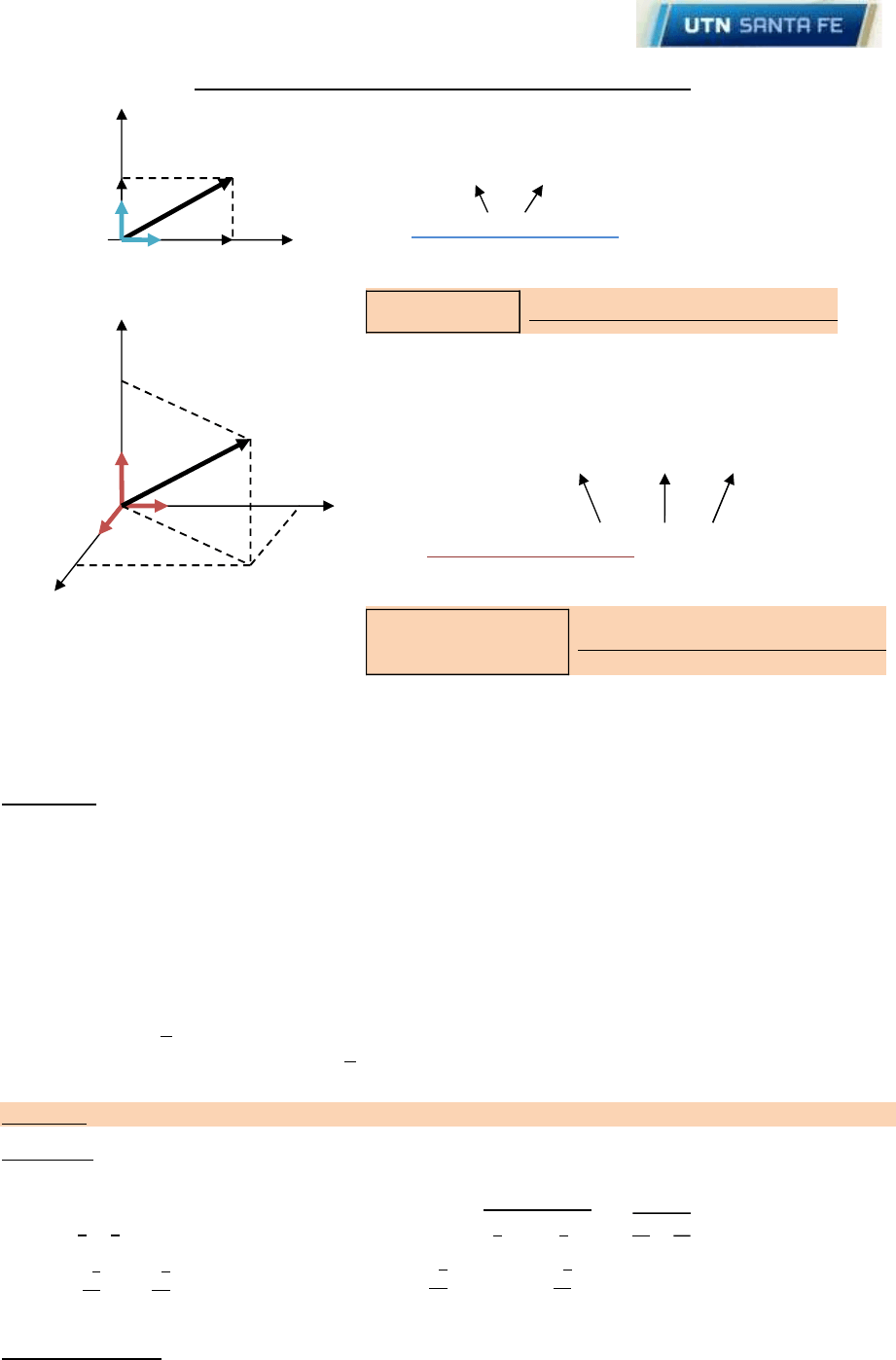
(B) Descomposición canónica y Vectores canónicos en R
2
y R
3
.
0
𝑏
𝑣̅=
𝑎
𝑏
=
𝑎
0
+
0
𝑏
=𝑎
𝟏
𝟎
+ 𝑏
𝟎
𝟏
=𝑎
̅
+ 𝑏
̅
̅
=
𝟎
𝟏
x Vectores canónicos en R
2
: son los vectores de módulo 1
̅
=
𝟏
𝟎
𝑎
0
sobre los semiejes positivos de las x y de las y.
z
𝑎
𝑏
=𝑎 𝚤̅ + 𝑏 𝚥̅ Descomposición canónica de 𝒗
∈𝑹
𝟐
𝑐
𝒌
𝑣̅=
𝑎
𝑏
𝑐
=
𝑎
0
0
+
0
𝑏
0
+
0
0
𝑐
=𝑎
𝟏
𝟎
𝟎
+ 𝑏
𝟎
𝟏
𝟎
+ 𝑐
𝟎
𝟎
𝟏
=𝑎
̅
+ 𝑏
̅
+ 𝑐𝒌
̅
𝑏 y
𝒊
̅
Vectores canónicos en R
3
: son los vectores de módulo 1
x 𝑎 (𝑎,𝑏,0) sobre los semiejes positivos de las x, de las y y de las z.
𝑎
𝑏
𝑐
=𝑎 𝚤+ 𝑏 𝚥̅+ 𝑐 𝑘
Descomposición canónica de 𝒗
∈𝑹
𝟑
De ahora en más cuando se escriba 𝑣̅= 2
̅
+ 7
̅
− 11 𝒌
sabremos que es “lo mismo” que 𝑣̅=
2
7
−11
.
EJEMPLO 6: Escribir como vector renglón o columna los siguientes vectores de R
3
e indicar a qué plano
coordenado pertenece cada uno.
a) 𝑣̅= 2 𝚤̅−0,5 𝚥̅ Rta: 𝑣̅=
2
−0,5
0
es un vector contenido en el plano xy.
b) 𝑣̅= − 𝚤̅+ 3 𝑘
Rta: 𝑣̅=
−1
0
3
es un vector contenido en el plano xz.
c) 𝑣̅= 7𝚥̅ −
√
2
𝑘
Rta: 𝑣̅=
0
7
−
√
2
es un vector contenido en el plano yz.
Definición: Un vector unitario (o versor) es un vector de módulo 1.
EJEMPLO 7:
a) Los vectores canónicos de R
2
y R
3
son unitarios, pues por definición todos tienen magnitud 1.
b)
es un vector unitario pues su módulo es
+
=
+
=1.
c)
√
0
√
es un vector unitario pues
√
+ 0
+
√
=1. Entonces tiene módulo 1.
8
Ejercicios sugeridos: Guía 2 “Vectores”
Con frecuencia resulta conveniente disponer de un vector unitario que tenga la misma dirección que un
vector dado 𝑣̅. A tal vector se le llama versor asociado al vector 𝒗
y el siguiente teorema proporciona la
forma de proceder para hallarlo:
Teorema: Sea 𝑣̅ un vector no nulo de R
2
(o R
3
) entonces 𝑣̅
=
|
|
es el versor asociado a 𝑣̅ .
Demostración: Sólo hay que probar que el módulo de 𝑣̅
es 1 y que tiene la misma dirección que 𝑣̅.
|
𝑣
0
|
=
|
|
=
|
|
𝑣̅=
|
|
|
𝑣̅
|
= 1 Entonces 𝑣̅
es un vector unitario.
Por definición de Simplificando
Multip por un escalar el escalar
|
𝑣̅
|
Por propiedad:
|
𝛼𝑣
|
=
|
𝛼
|
|
𝑣̅
|
Ahora como 𝑣̅
=
|
|
=
|
|
𝑣̅ y
|
|
es un escalar positivo, entonces
𝑣̅
es un múltiplo positivo de
𝑣̅
por lo cual ambos tienen la misma dirección.
Observación: Si recordamos la definición de los cosenos directores, se puede verificar que el vector
cuyas componentes son los cosenos directores de un vector 𝑣̅ es justamente el versor asociado a 𝑣̅.
Si 𝜃 es la dirección de un vector en R
2
, entonces 𝑣̅
=
cos𝜃
sen 𝜃
es el versor asociado a 𝑣̅=
𝑎
𝑏
.
Si 𝛼,𝛽,𝛾 son los ángulos directores de 𝑣̅∈ R
3
, entonces 𝑣̅
=
cos𝛼
cos
𝛽
cos𝛾
es el versor asociado a
𝑣̅=
𝑎
𝑏
𝑐
.
4.4- Significado geométrico del producto escalar (o producto punto) en R
2
y R
3
.
Veremos que este producto está relacionado con el ángulo que determinan dos vectores no nulos.
Ángulos entre vectores: Sean 𝑢 y 𝑣̅ dos vectores no nulos de R
2
(o R
3
) . 𝒖
El ángulo 𝝋 entre 𝒖
𝒚 𝒗
está definido como el ángulo
no negativo más pequeño entre las representaciones 𝝋 𝒗
de 𝑢 y 𝑣̅ aplicadas en un mismo punto.
De la definición resulta claro que los valores posibles para el ángulo entre dos vectores es 0≤ 𝝋 ≤ 𝜋
El siguiente resultado se utilizará con frecuencia en ejercicios y deducciones:
Teorema: Módulo de un vector en términos del producto escalar.
Sea 𝑣̅ un vector de R
2
(o R
3
). Entonces 𝑣̅∙ 𝑣̅=
|
𝑣
|
“el producto escalar de un vector por sí mismo es
es igual al cuadrado del módulo de 𝑣̅ “
Demo: Sea 𝑣̅=
𝑎
𝑏
𝑐
. Entonces 𝑣̅.𝑣̅=
𝑎
𝑏
𝑐
.
𝑎
𝑏
𝑐
=𝑎
+ 𝑏
+ 𝑐
=
|
𝑣
|
∎
Advertencia : Notar que
|
𝑣
|
es un escalar que no hay que confundir con
𝑣̅
, lo cual NO TIENE SENTIDO.
Sólo se ha definido la potencia para matrices cuadradas, no existe potencia de un vector!
9
Ejercicios sugeridos: Guía 2 “Vectores”
Ahora podemos deducir la interpretación geométrica del producto escalar o producto punto.
Teorema: Sean 𝑢 y 𝑣̅ vectores no nulos de R
2
(o R
3
). Si 𝜑 es ángulo entre ellos, entonces 𝐜𝐨𝐬𝝋=
𝒖
∙ 𝒗
|
𝒖
||
𝒗
|
Demo: En esta demostración es necesario aplicar la ley de los cosenos al triángulo que queda determinado
por los vectores 𝑢 y 𝑣̅ (aplicados en un mismo punto) y la resta entre ambos, ya sea (𝑢− 𝑣̅ ) o (𝑣̅− 𝑢).
𝒖
La ley (o teorema) de los cosenos establece que el cuadrado de un lado es igual
a la suma de los cuadrados de los otros dos, menos 2 veces el producto de esos
𝝋 𝒖
− 𝒗
lados por el coseno del ángulo que forman, entonces en términos de los módulos
|
𝒖
− 𝒗
|
𝟐
=
|
𝒖
|
𝟐
+
|
𝒗
|
𝟐
− 𝟐
|
𝒖
||
𝒗
|
𝐜𝐨𝐬𝝋 (1)
𝒗
Aplicando el teorema anterior para calcular
|
𝑢− 𝑣̅
|
en términos del producto punto,
|
𝒖
− 𝒗
|
𝟐
=(𝒖
− 𝒗
).( 𝒖
− 𝒗
) = 𝒖
.𝒖
− 𝒖
. 𝒗
− 𝒗
.𝒖
+ 𝒗
.𝒗
=
|
𝒖
|
𝟐
− 𝟐𝒖
.𝒗
+
|
𝒗
|
𝟐
(2)
Prop distributiva Teorema anterior
Igualando (1) y (2) del producto punto y conmutativa del prod.
|
𝒖
|
𝟐
+
|
𝒗
|
𝟐
− 𝟐
|
𝒖
||
𝒗
|
𝐜𝐨𝐬𝝋=
|
𝒖
|
𝟐
− 𝟐 𝒖
.𝒗
+
|
𝒗
|
𝟐
|
𝒖
||
𝒗
|
𝐜𝐨𝐬𝝋=𝒖
.𝒗
o sea 𝐜𝐨𝐬𝝋=
𝒖
∙ 𝒗
|
𝒖
||
𝒗
|
∎
Cancelando los términos iguales a cada lado
y simplificando el factor (-2)
EJEMPLO 8: Cálculo de los cosenos directores usando la fórmula del coseno del ángulo entre vectores.
Sea 𝜶 en ángulo (director) que forma 𝒗
con el semieje positivo de las 𝑥, o sea 𝜶=á𝐧𝐠𝐮𝐥𝐨
(
𝒗
,
̅
)
. Entonces
𝐜𝐨𝐬𝜶=
̅ ∙ 𝒗
|
̅
||
𝒗
|
=
𝒂
|
𝒗
|
pues
1
0
0
.
𝒂
𝒃
𝒄
=𝒂 y
|
̅
|
=1.
Análogamente se obtienen las fórmulas para cos 𝛽 y cos 𝛾.
Consecuencias del teorema anterior:
La fórmula
|
𝒖
||
𝒗
|
𝐜𝐨𝐬𝝋=𝒖
.𝒗
proporciona otra forma de hallar el producto escalar entre vectores
cuando no se conocen las componentes de los vectores sino sus módulos y el ángulo que
determinan (es la fórmula que utilizan en física para calcular el trabajo realizado por una fuerza).
El signo del producto escalar indica el tipo de ángulo que determinan los vectores, pues
𝒖
.𝒗
=
|
𝒖
||
𝒗
|
𝐜𝐨𝐬𝝋=
⎩
⎪
⎨
⎪
⎧
>0 ↔ 𝐜𝐨𝐬𝝋>0 ↔ 𝝋 𝐞𝐬 𝐚𝐠𝐮𝐝𝐨
<0 ↔ 𝐜𝐨𝐬𝝋<0 ↔ 𝝋 𝐞𝐬 𝐨𝐛𝐭𝐮𝐬𝐨
=𝟎 ↔ 𝐜𝐨𝐬𝝋=𝟎 ↔ 𝝋 𝐞𝐬 𝐫𝐞𝐜𝐭𝐨
Recordar que 0 ≤
𝜑 ≤ 180º
Antes de ver otras aplicaciones de esta fórmula en la deducción de resultados que utilizaremos con mucha
frecuencia en ejercicios y problemas, vamos a dar las siguientes definiciones:
10
Ejercicios sugeridos: Guía 2 “Vectores”
Vectores paralelos: dos vectores diferentes de cero son paralelos si el ángulo entre ellos es 0 o 𝜋.
Vectores ortogonales (o perpendiculares): dos vectores no nulos son ortogonales si el ángulo entre ellos es
.
Teorema: Dos vectores no nulos 𝑢,𝑣̅ ∈𝑅
(
𝑜 𝑅
)
son paralelos si y sólo si 𝑣̅ =𝛼𝑢 para alguna constante 𝛼.
(O sea, si y sólo si uno es un múltiplo escalar del otro)
Advertencia: Cuando en un teorema como este se establece una equivalencia entre dos proposiciones p y q,
es necesario hacer la demostración “de ida y vuelta” (o sea p ⇒ q y q ⇒ p, luego p ⇔ q )
Demostración:
(La “ida”) Si 𝑢,𝑣̅ son no nulos y paralelos, entonces el versor asociado a uno de ellos tendrá la misma
dirección (o la dirección opuesta) que el versor asociado al otro, es decir 𝑣̅
=± 𝑢
. Entonces por
definición de versor,
𝑣̅
|
𝑣̅
|
=±
𝑢
|
𝑢
|
⇒ 𝑣̅=±
𝑢
|
𝑢
|
|
𝑣̅
|
⇒ 𝑣̅=±
|
𝑣̅
|
|
𝑢
|
𝑢 ⇒ 𝑣̅=𝛼𝑢 con 𝛼=±
|
𝑣̅
|
|
𝑢
|
(La “vuelta”) Ahora si
𝑣̅ =𝛼𝑢 para alguna constante 𝛼, debemos probar que 𝑢,𝑣̅ son paralelos. Usando la
fórmula para el ángulo 𝝋 entre ambos vectores, reemplazando 𝑣̅ =𝛼𝑢 ,
cos𝜑=
𝑢 ∙ 𝛼𝑢
|
𝑢
||
𝛼𝑢
|
=
𝛼
|
𝛼
|
𝑢 ∙ 𝑢
|
𝑢
||
𝑢
|
=
𝛼
|
𝛼
|
|
𝑢
|
|
𝑢
|
=±1 ⇒
cos𝜑=+1 ⇒𝜑=0
cos𝜑=−1 ⇒𝜑=𝜋
⇒
𝑢
,𝑣
son paralelos
∎
Por propiedades de la Teorema de módulo de un
0≤ 𝝋 ≤ 𝜋
multiplicación por un escalar vector y producto punto
Teorema: Dos vectores no nulos 𝑢,𝑣̅ ∈𝑅
(
𝑜 𝑅
)
son ortogonales si y sólo si
𝑢.𝑣̅=0
Demostración:
(“ida”) Si 𝑢,𝑣̅ son no nulos y ortogonales entonces
𝜑=
𝜋
2
𝑢.𝑣̅=
|
𝑢
||
𝑣̅
|
cos
𝜋
2
𝑢.𝑣̅ =0.
(“vuelta”) Si
𝑢.𝑣̅=0
|
𝑢
||
𝑣̅
|
cos𝜑=0 y como
|
𝑢
||
𝑣̅
|
≠0 ya que 𝑢,𝑣̅ no son nulos
⇒
cos𝜑=0
𝝋
𝜑=
y por definición, los vectores son ortogonales ∎
Ejemplo 9: Decidir si los siguientes vectores son paralelos o perpendiculares o ninguno de las dos.
a)
𝑢=
0,5
−1
y 𝑣̅=
2
1
. Rta: Son perpendiculares pues
0,5
−1
.
2
1
=
(
0,5
)(
2
)
− 1=0
b)
𝑢
=3 𝑖 −3𝑘 y 𝑣
=−𝜋 𝑖+ 𝜋 𝑗 . Rta: El ángulo entre ellos es obtuso pues 𝑢.𝑣̅=−3𝜋<0. No son
perpendiculares ni paralelos.
c)
𝑢
=3 𝑖 −3𝑘 y 𝑣
=−
√
3 𝑖 +
√
3 𝑘 . Rta: Son paralelos pues 𝑣̅= (−
√
3/3)𝑢 “uno es múltiplo del otro”
Otra forma es ver que cos𝜑=−1 ( o sea
𝜑=180°)
11
Ejercicios sugeridos: Guía 2 “Vectores”
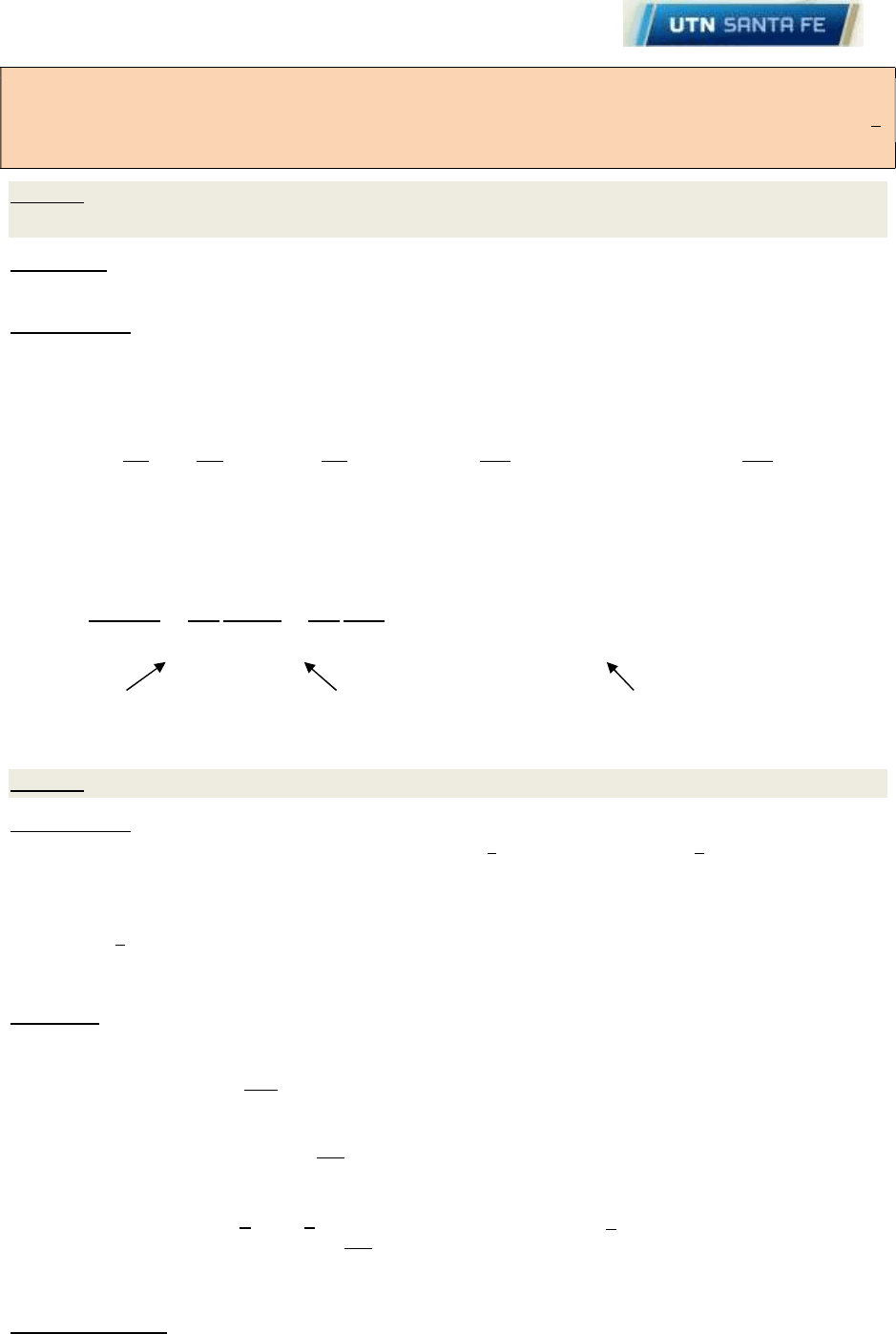
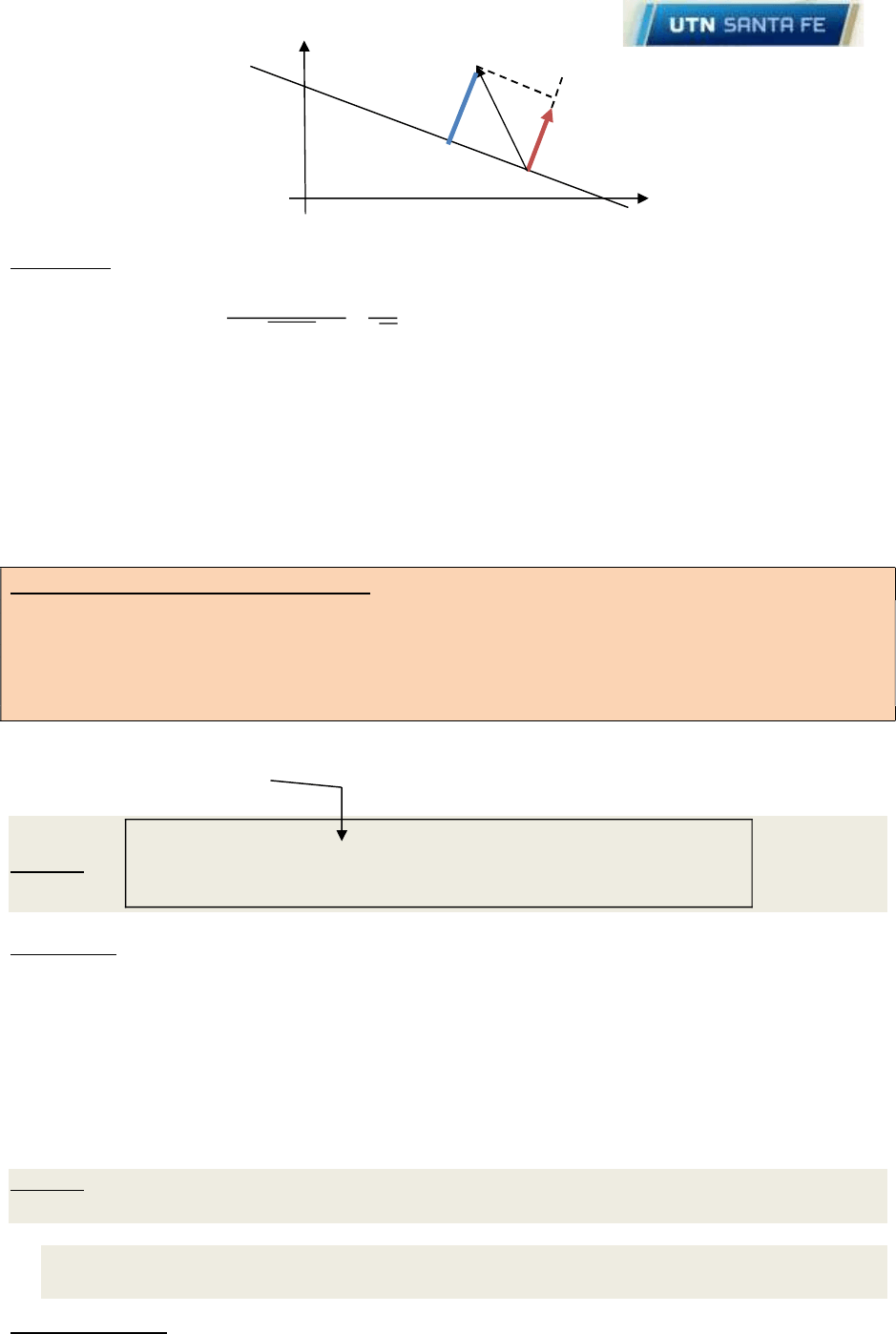
Interpretación geométrica de los coeficientes 𝒂 𝐲 𝒃 de la ecuación general de la recta en el plano
Sea una recta 𝑟 en el plano con ecuación general : 𝑎𝑥+ 𝑏𝑦 +𝑐=0
𝑦
𝑃 𝒏
𝑄
𝑥
,
𝑦
∈𝑟 ⇒ 𝑎𝑥
+ 𝑏𝑦
+ 𝑐=0 (1)
𝑦
𝑄 𝑃
𝑥
,
𝑦
∈𝑟 ⇒ 𝑎𝑥
+ 𝑏𝑦
+ 𝑐=0 (2)
𝑥
𝑥
𝑟 Restando las ecuaciones (1) – (2) resulta,
(𝑎𝑥
+ 𝑏𝑦
+ 𝑐) −
(
𝑎𝑥
+ 𝑏𝑦
+ 𝑐
)
=0
⇒
𝑎(𝑥
2
−𝑥
1
)+ 𝑏(𝑦
2
–𝑦
1
)=0
⇒
𝑎
𝑏
∙
𝑥
2
− 𝑥
1
𝑦
2
–𝑦
1
𝑃𝑄
=0
⇒
Los vectores
𝑎
𝑏
𝑦 𝑃𝑄
=
𝑥
− 𝑥
𝑦
–𝑦
son ortogonales y como 𝑃𝑄
está en la recta r, queda probado que
𝑛=
𝑎
𝑏
es perpendicular a 𝑟:𝑎𝑥+ 𝑏𝑦+ 𝑐=0 Consecuencia: ±
−𝑏
𝑎
paralelos a 𝑟. ¿Por qué?
EJEMPLO 10: Determinar un vector perpendicular y uno paralelo a la recta 𝑟: 2𝑥+ 5𝑦=5. Verificar
graficando la recta y los vectores hallados. Rta: 𝑛=
2
5
es
perpendicular y 𝑢=
−5
2
es paralelo a 𝑟.
------------------------------------------------------
4.5- Proyecciones en R
2
y R
3
: Otras aplicaciones del producto escalar.
El concepto de proyección de un vector sobre otro se aplica en muchos problemas interesantes, como son
los que involucran el cálculo de distancias a una recta en el plano, cálculo de distancias a un plano en el
espacio y entre rectas (alabeadas), cálculo del volumen de un paralelepípedo, por nombrar algunos.
Teorema: Si
𝑢 y 𝑣̅
son no paralelos en R
2
(o R
3
) entonces el vector
𝑤=𝑢−
.
|
|
𝑣̅
es ortogonal a
𝑣̅
.
Demostración: Para probar que dos vectores son ortogonales basta con ver que su producto escalar es 0.
𝑤.𝑣̅=𝑢−
𝑢.𝑣̅
|
𝑣̅
|
𝑣̅
.𝑣̅= 𝑢 .𝑣̅−
𝑢.𝑣̅
|
𝑣̅
|
𝑣̅ .𝑣̅=𝑢 .𝑣̅− 𝑢 .𝑣̅=0. ∎
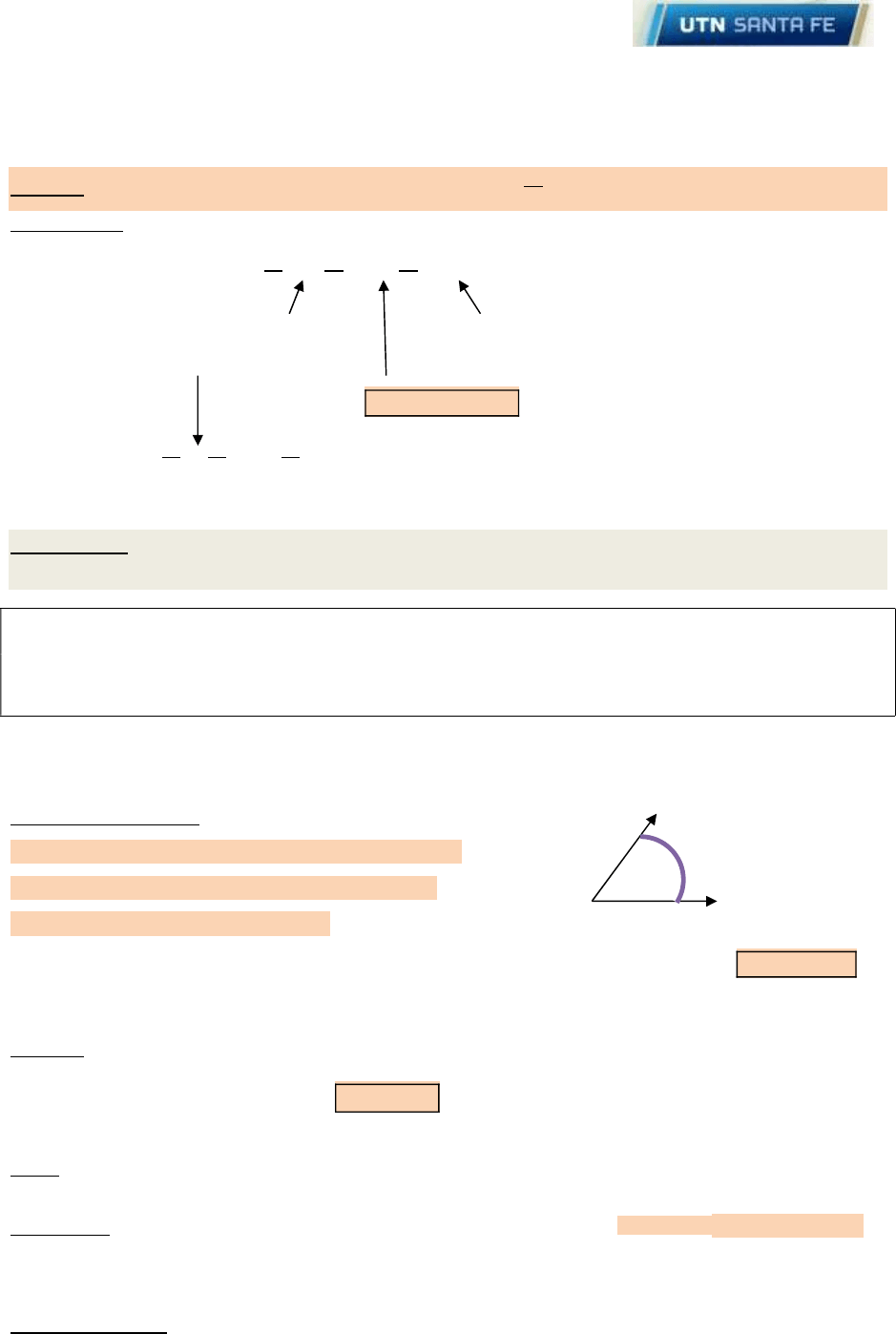
Observación: Si interpretamos geométricamente este teorema, aplicando
𝑢 y 𝑣̅ en un mismo punto,
vamos a descubrir que el vector
𝒖
.𝒗
|
𝒗
|
𝟐
𝒗
que se resta a
𝑢 para que el resultado 𝒘
sea ortogonal a 𝑣̅,
debe ser el vector con punto inicial en el origen común de 𝑢 y 𝑣̅ y punto final en el punto inicial de
𝑤. Verifiquemos lo dicho analizando los siguientes dibujos,
𝑢 𝑢 𝑢=
𝒘
𝒘
𝒘
𝑣̅ 𝑣̅ 𝟎
* 𝑣̅
El vector celeste se llama proyección de 𝒖
𝐬𝐨𝐛𝐫𝐞 𝒗
12
Ejercicios sugeridos: Guía 2 “Vectores”
Definición de Vector Proyección: Si 𝑢 y 𝑣̅
son vectores distintos del cero en R
2
(o R
3
), el
vector proyección de
𝒖
𝐬𝐨𝐛𝐫𝐞 𝒗
es 𝐩𝐫𝐨𝐲
𝒗
𝒖
=
𝒖
.𝒗
|
𝒗
|
𝟐
𝒗
(1)
Con frecuencia solo interesa el módulo del vector proyección, en tal caso es útil recordar que
|
𝐩𝐫𝐨𝐲
𝒗
𝒖
|
=
|
𝒖
.𝒗
|
|
𝒗
|
(2) Advertencia No confundir estas fórmulas: (1) es un vector y (2) es un escalar.
Observaciones: A partir de los dibujos de las tres situaciones posibles podemos concluir que
El ángulo entre
𝑢 y 𝑣̅ es agudo (𝑢 .𝑣̅>0) ⇔ 𝑣
y proy
𝑣
𝑢
tienen la misma dirección.
El ángulo entre
𝑢 y 𝑣̅ es obtuso (𝑢 .𝑣̅<0) ⇔ 𝑣
y proy
𝑣
𝑢
tienen direcciones opuestas.
El ángulo entre
𝑢 y 𝑣̅ es recto (𝑢 .𝑣̅=0) ⇔
proy
𝑣
𝑢
=0
.
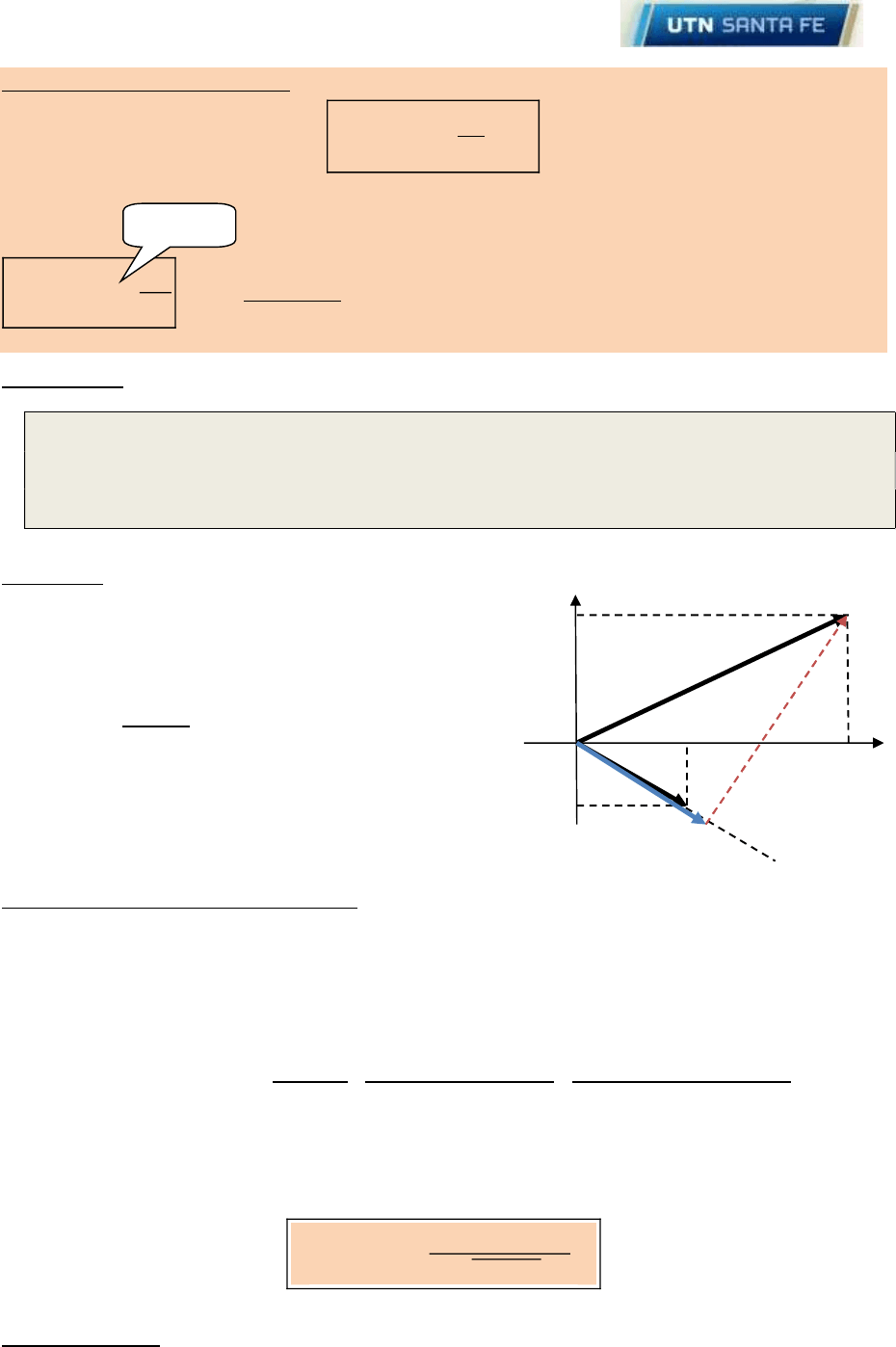
EJEMPLO 11: Calcular el vector proyección de
𝑃𝑄
sobre
𝑣̅=3𝑖− 2𝑗
siendo
𝑃
(-3 ;1 ) y
𝑄
(5 ; 5) y graficar
todos los vectores. 4
𝑃𝑄
=
5
5
−
−3
1
=
8
4
𝑷𝑸
𝐩𝐫𝐨𝐲
𝒗
𝑷𝑸
=
8
4
.
3
−2
3
2
+(−2)
2
3
−2
=
48/13
−32/13
~
𝟑,𝟕
−𝟐,𝟓
𝒘
3 8
-2
𝒗
𝐩𝐫𝐨𝐲
𝒗
𝑷𝑸
Distancia de un punto a una recta en R
2
(Una aplicación de proyección)
En el gráfico que sigue podemos observar un punto 𝑃
(𝑥
,𝑦
) que no pertenece a la recta 𝑟 de ecuación
𝑎𝑥+ 𝑏𝑦 + 𝑐=0. Si en el dibujo se incluye el vector perpendicular a la recta, 𝑛
⃗
=(𝑎 ;𝑏), aplicado sobre un
punto 𝑃
(𝑥
,𝑦
) perteneciente a dicha recta, se puede observar que la distancia desde el punto
𝑃
a la recta
𝑟 es el módulo del vector proyección de 𝑃
𝑃
⃗
sobre el vector 𝑛
⃗
. Entonces planteamos y resolvemos:
dist(
𝑃
,
𝑟
)
=
proy
⃗
𝑃
1
𝑃
⃗
=
⃗
. 𝑃
1
𝑃
0
⃗
|
⃗
|
=
|
(
)
(
)|
|
⃗
|
=
|
– (
)
|
|
⃗
|
Ahora como 𝑃
(𝑥
, 𝑦
) є
𝑟, 𝑃
satisface la ecuación de esta recta, por lo cual 𝑎𝑥
+ 𝑏𝑦
+ 𝑐=0.Entonces
podemos reemplazar los términos entre paréntesis por
(
–𝑐
)
y así resulta que la distancia de 𝑃
a la recta
𝑟
es
dist
(
𝑃
,𝑟
)
=
|
𝑎𝑥
+ 𝑏𝑦
+ 𝑐
|
√𝑎
+ 𝑏
Probarlo!
13
Ejercicios sugeridos: Guía 2 “Vectores”
𝑟: 𝑎𝑥+ 𝑏𝑦 + 𝑐=0 𝑃
(𝑥
,𝑦
)
dist 𝒏
=
𝒂
𝒃
𝑃
(𝑥
,𝑦
)
𝑥
EJEMPLO 12: Hallar la distancia del punto A(-2,3) a la recta r) 4x+5y-6 = 0
dist (A, r) =
|
(
)
(
)
|
√
=
√
~ 0,156
Graficar la recta y marcar su distancia al punto.
-------------------------------------------------------
4.6- Producto cruz (o vectorial) entre vectores de R
3
Hasta el momento el único producto entre vectores que hemos definido es el producto punto (o escalar).
Ahora definiremos un nuevo producto llamado producto cruz (o vectorial) entre vectores de R
3
, cuyo
resultado es un vector de R
3
.
Definición de Producto cruz (o vectorial)
Si 𝑢=𝑢
𝚤̅+ 𝑢
𝚥̅+ 𝑢
𝑘
y 𝑣̅=𝑣
𝚤̅ + 𝑣
𝚥̅+ 𝑣
𝑘
, entonces el producto cruz o vectorial es
𝑢×𝑣̅=
(
𝑢
𝑣
− 𝑢
𝑣
)
𝚤̅+
(
𝑢
𝑣
− 𝑢
𝑣
)
𝚥̅+ (𝑢
𝑣
− 𝑢
𝑣
)𝑘
(*)
Afortunadamente el siguiente teorema proporciona una forma sencilla de calcular el producto cruz usando
la definición de determinante
Teorema:
𝑢×𝑣̅=
𝚤̅ 𝚥̅ 𝑘
𝑢
𝑢
𝑢
𝑣
𝑣
𝑣
=
𝑢
𝑢
𝑣
𝑣
𝚤̅−
𝑢
𝑢
𝑣
𝑣
𝚥̅+
𝑢
𝑢
𝑣
𝑣
𝑘
=(∗)
EJEMPLO 13: Calcular el producto vectorial de
𝑢=−2𝚤̅ + 3𝚥̅+ 7𝑘
y 𝑣̅=4𝚥̅− 5𝑘
𝑢× 𝑣̅=
𝚤̅ 𝚥̅ 𝑘
−2 3 7
0 4 −5
=
3 7
4 −5
(
)
()
𝚤̅ −
−2 7
0 −5
(
)
()
𝚥̅+
−2 3
0 4
(
)
()
𝑘
=
−43
−10
−8
¿Qué propiedades tiene este producto? Teniendo en cuenta que para calcularlo se utiliza un
determinante, es fácil intuir y justificar sus propiedades:
Teorema: Propiedades del producto cruz o vectorial
Si 𝑢 ,𝑣̅ y 𝑤
son vectores de R
3
y 𝛼 es un escalar, entonces:
i.
𝑢×0
=0
× 𝑢=0
(vector nulo) “si un determinante tiene un renglón de ceros, dicho
determinante es cero, esto es 0𝚤̅ + 0𝚥̅+ 0𝑘
= 0
”
14
Ejercicios sugeridos: Guía 2 “Vectores”
ii.
𝑢×𝑣̅=−𝑣̅× 𝑢 (anticonmutativa) “un determinante cambia de signo si se intercambian
dos renglones”
iii.
(
𝛼
𝑢
)
× 𝑣
=𝑢
× (
𝛼
𝑣
)=𝛼(
𝑢
×𝑣
) “si un renglón está multiplicado por
𝛼, este escalar puede
pasar a otro renglón o sacarse fuera del determinante”
iv.
𝑢×
(
𝑣̅+𝑤
)
=𝑢× 𝑣̅+ 𝑢× 𝑤 “propiedad distributiva del producto cruz , se corresponde
con la propiedad de descomposición de un determinante en la suma de otros dos”
v.
Si 𝑢 ,𝑣̅ son distintos de cero y paralelos entonces 𝑢× 𝑣̅=0
“en efecto, al ser paralelos
uno es múltiplo del otro y un determinante con renglones proporcionales es cero”
vi.
(
𝑢× 𝑣̅
)
∙ 𝑤= 𝑢∙ (𝑣̅× 𝑤) “esto se llama producto mixto o triple producto escalar” y
puede demostrarse que no es más que el determinante que tiene por renglones(o colum.)
las componentes de los tres vectores, en símbolos 𝑢∙
(
𝑣̅× 𝑤
)
=det(𝑢,𝑣̅,𝑤) 𝑢× 𝑣̅
vii.
𝑢∙
(
𝑢× 𝑣̅
)
=𝑣̅∙
(
𝑢× 𝑣̅
)
=0∈𝑅 “o sea,
(
𝑢×𝑣̅
)
es ortogonal a 𝑢 y 𝑣̅
“los determinantes con dos renglones iguales, valen 0”
𝑢 𝑣̅
EJEMPLO 14: Calcular el producto mixto entre
𝑢=−2𝚤̅+ 3𝚥̅+7𝑘
, 𝑣̅=4𝚥̅− 5𝑘
y 𝑤=𝚤̅ + 𝚥̅ + 𝑘
.
𝑢×𝑣 ∙ 𝑤=
−2 3 7
0 4 −5
1 1 1
=−61 Enseguida veremos su significado geométrico.
Teorema: Módulo del producto cruz. Si 𝜑 es el ángulo entre
𝑢 y 𝑣̅ , entonces
|
𝑢×𝑣
|
=
|
𝑢
||
𝑣
|
𝑠𝑒𝑛
𝜑
Demostración: Es fácil demostrarlo partiendo de la siguiente identidad (Identidad de Lagrange)=
|
𝑢
× 𝑣
|
=
|
𝑢
|
|
𝑣
|
−
(
𝑢
.𝑣
)
Reemplazando ahora el producto punto en términos de los módulos y ángulo entre los vectores
|
𝑢
× 𝑣
|
=
|
𝑢
|
|
𝑣
|
−
|
𝑢
|
|
𝑣
|
cos
𝜑=
|
𝑢
|
|
𝑣
|
(
1 − cos
𝜑
)
=
|
𝑢
|
|
𝑣
|
sen
𝜑
𝑢.𝑣̅=
|
𝑢
||
𝑣
|
𝑐𝑜𝑠
𝜑 “Aplicando raíz cuadrada a ambos lados, con sen 𝜑≥0 pues 0≤𝜑 ≤𝜋”
|
𝑢× 𝑣
|
=
|
𝑢
||
𝑣
|
𝑠𝑒𝑛
𝜑
∎
Interpretación geométrica del teorema módulo del producto cruz
Aplicando los vectores
𝑢
y 𝑣
en un mismo punto, 𝑣̅
podemos considerar el paralelogramo h=
|
𝒗
|
𝐬𝐞𝐧
𝝋
Á𝑟𝑒𝑎=(base)(altura)=
|
𝑢
||
𝑣
|
𝑠𝑒𝑛
𝜑
Á𝑟𝑒𝑎=
|
𝑢
× 𝑣
|
𝜑
𝑢
15
Ejercicios sugeridos: Guía 2 “Vectores”
EJEMPLO 15 : Determinar el valor de 𝛼 para que el área del paralelogramo que determinan los vectores
𝑢=
𝛼
𝚤̅+𝚥̅− 𝑘
y 𝑣̅=𝚥̅− 2𝑘
sea de 6 unidades cuadradas.
𝑢×𝑣̅=
𝚤̅ 𝚥̅ 𝑘
𝛼
1 −1
0 1 −2
=
−1
−(−2
𝛼
)
𝛼
|
𝑢×𝑣
|
=
(−1)
+ (2
𝛼)
+
𝛼
=
1 + 5
𝛼
=6
Despejando
𝛼
=
6
2
−1
5
𝛼=±
√
7
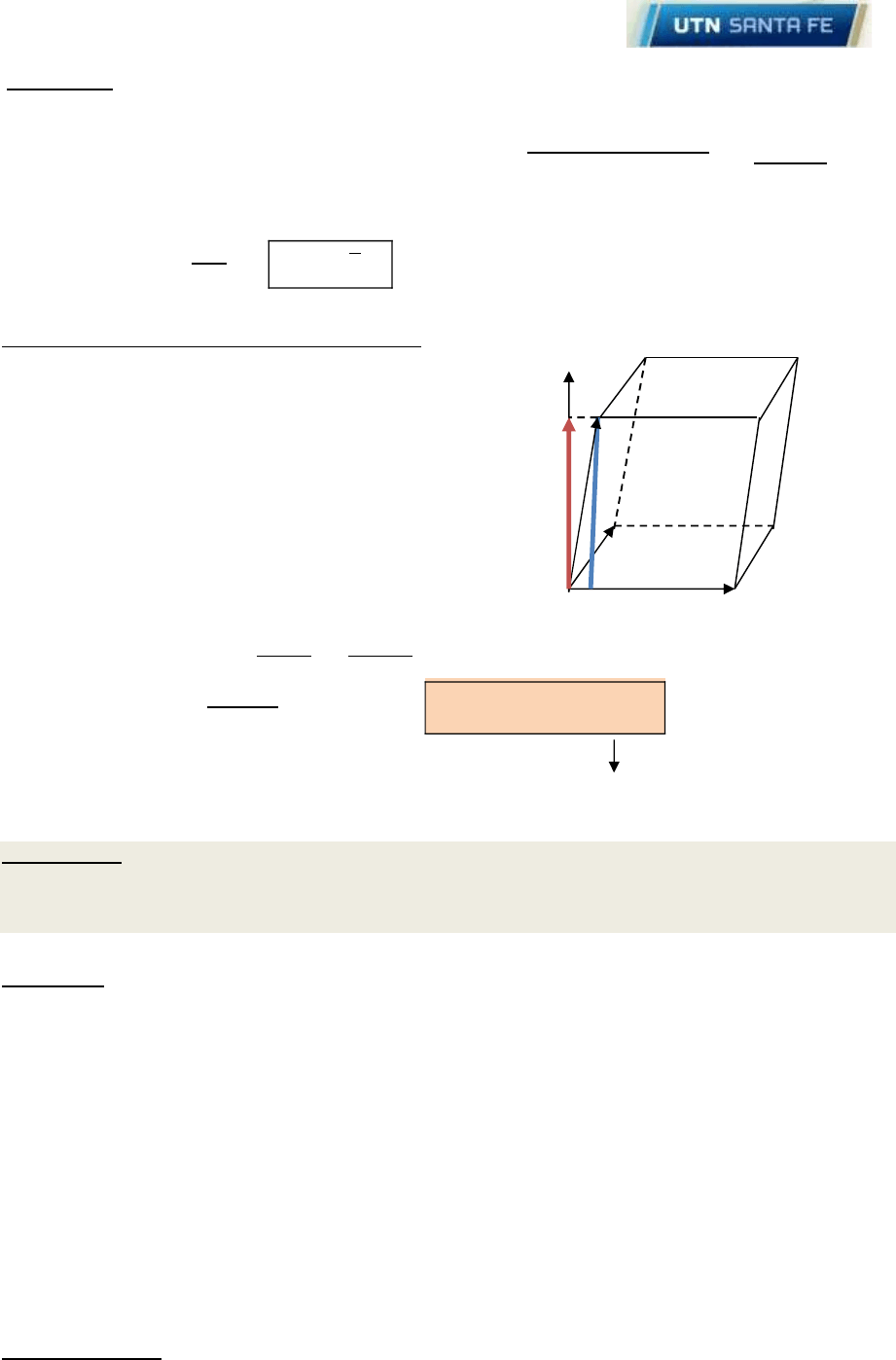
Interpretación geométrica del producto mixto.
Sean 𝑢 ,𝑣̅ y 𝑤 vectores no nulos que no u× v
están en un mismo plano.
Los aplicamos en un mismo punto y
los consideramos aristas adyacentes 𝑤 h
de un paralelepípedo que dibujamos
para calcular su volumen.
Volumen = (Área de la base)(altura) 𝑣̅
Como la base es un paralelogramo determinado
𝑢
por
𝑢 y 𝑣̅, entonces su
Área =
|
𝑢×𝑣
|
.
La altura
h =
|
𝐩𝐫𝐨𝐲
𝒖
×𝒗
𝒘
|
=
𝑢
×𝑣
.𝑤
|
𝑢
×𝑣
|
=
|
𝑢
×𝑣
.𝑤
|
|
𝑢
×𝑣
|
. Reemplazando área de la base y altura, tenemos que
𝑉𝑜𝑙𝑢𝑚𝑒𝑛=
|
𝑢
× 𝑣
|
|
×
.
|
|
×
|
𝑉𝑜𝑙𝑢𝑚𝑒𝑛=
|
𝑢× 𝑣 .𝑤
|
“El volumen de un paralelepípedo determinado por tres
vectores, es el valor absoluto del producto mixto entre ellos”
Consecuencia:
Tres vectores de R
3
son coplanares (es decir están en un mismo plano) si y sólo sí el producto mixto entre
ellos es cero ( Volumen = 0 ⇔ h=proy
×
𝑤= 0
por ser 𝑤 y 𝑢× 𝑣 ortogonales )
EJEMPLO 16: Calcular el volumen del paralelepípedo determinado por los vectores
𝑢=−2𝚤̅+ 3𝚥̅ + 7𝑘
,
𝑣̅=4𝚥̅− 5𝑘
y 𝑤=𝚤̅+ 𝚥̅+ 𝑘
.
𝑢×𝑣 ∙ 𝑤=
−2 3 7
0 4 −5
1 1 1
=−61
⇒
Volumen =
|
−61
|
=61 unidades cúbicas.
---------------------------------------------------

Tema 4_Vectores.pdf
 Estamos procesando este archivo...
Estamos procesando este archivo...
 Lamentablemente la previsualización de este archivo no está disponible. De todas maneras puedes descargarlo y ver si te es útil.
Lamentablemente la previsualización de este archivo no está disponible. De todas maneras puedes descargarlo y ver si te es útil.
Descargar
Estamos procesando este archivo...
Lamentablemente la previsualización de este archivo no está disponible. De todas maneras puedes descargarlo y ver si te es útil.