Pág. 1
MOMENTO ANGULAR
MOMENTO ANGULAR DE UNA PARTICULA
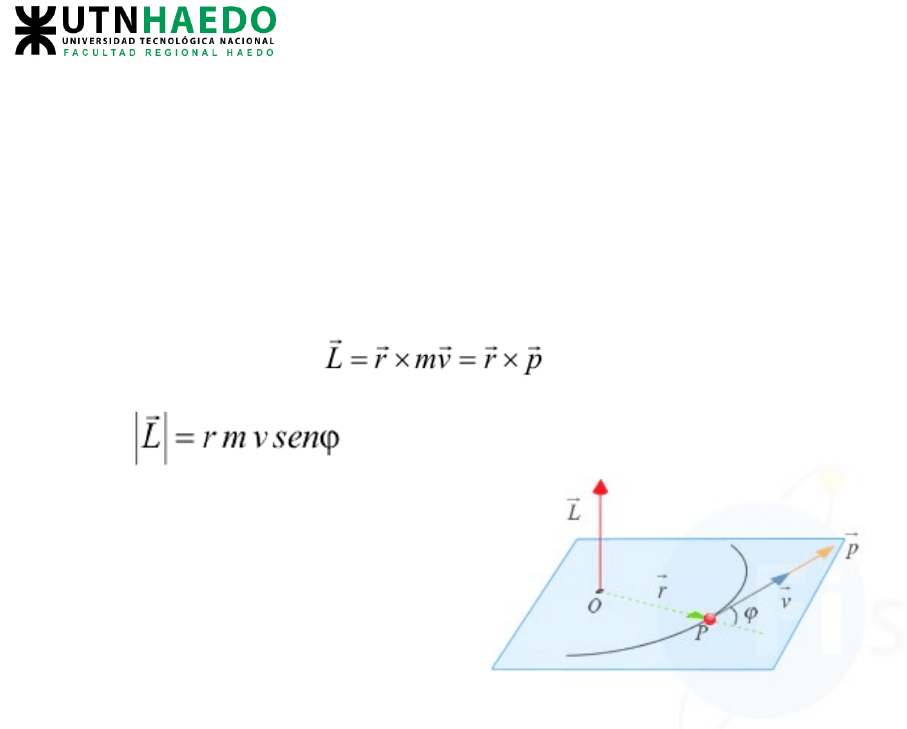
Consideremos una partícula de masa m que se mueve con respecto a O con una velocidad
. Definimos
una nueva magnitud vectorial, llamada momento angular de la partícula con respecto a O (
)
MODULO:
DIRECCION Y SENTIDO: El vector
es en cada
instante perpendicular al plano formado por el
vector posición y el vector velocidad; cuando
la trayectoria es plana y el origen está
contenido en el plano de esta,
es
perpendicular a dicho plano.
Sus unidades en SIU son: m
2
kg/s.
El momento angular de una partícula se define a partir de un vector posición y una partícula puntual
en movimiento, esto es, con cierta velocidad instantánea. No es una magnitud propia del cuerpo, sino
que depende del punto de referencia que se elija. Su significado físico tiene que ver con la rotación: El
momento angular caracteriza el estado de rotación de una partícula, del mismo modo que el momento
lineal caracteriza el estado de traslación lineal.
CASOS PARTICULARES:
•
=0 cuando es paralelo a . Es decir, cuando la partícula se mueve a lo largo de una línea
recta que pasa por el origen tiene un momento angular nulo con respecto a ese origen.
•
es máximo cuando es perpendicular a . En ese momento la partícula se mueve
exactamente igual que si estuviera en el borde de una rueda que gira alrededor del origen en
el plano definido por r y p (movimiento circular).
ó: = =
ó:
=
.
Pág. 2
EJEMPLO: Determina el momento angular de un satélite que se encuentra a 1000 km sobre la
superficie de la Tierra respecto al centro de esta sabiendo que su masa es de 1200 kg y describe una
órbita completa cada 87 minutos. El radio de la Tierra es de 6.37·10
6
m.
Datos
• Radio de la Tierra: R
t
= 6.37·10
6
m
• Altura sobre la Tierra: h = 1000 km = 10
6
m
• Masa del satélite: m = 1200 kg
• Si describe 1 revolución cada 87 minutos = 1/87 r.p.m,
entonces =
/ =
.
/=
/
Resolución
Podemos considerar el satélite como una partícula puntual para resolver este problema, pues la
trayectoria que describe es mucho mayor que su tamaño. La expresión del momento angular es:
Por otro lado, podemos calcular el valor de dicho momento angular
teniendo en cuenta que en el
movimiento circular, el ángulo que forman y
es de 90º.
Aplicamos la expresión:
= = .
= . . (
+ )
=
78.45 10
Donde hemos tenido en cuenta que r, la distancia del satélite al centro de la Tierra, es la suma del radio
de la Tierra más la altura a la que se encuentra el satélite sobre la superficie de esta. La dirección
de,
será perpendicular al plano en el que gira el satélite y para determinar el sentido aplicaríamos la
regla de la mano derecha si nos diesen el sentido de giro del satélite.
TEOREMA DE CONSERVACION DEL MOMENTO ANGULAR
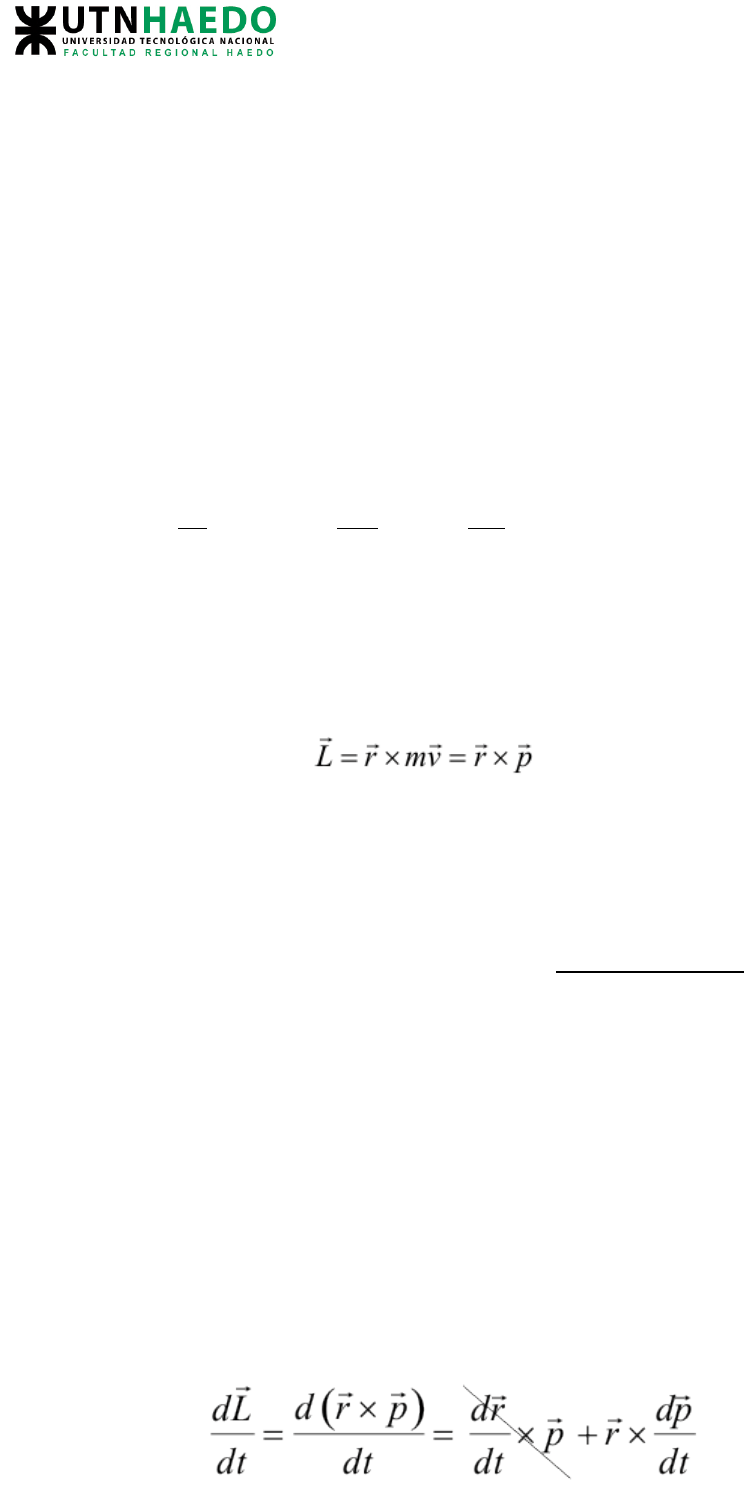
Para determinar bajo qué condiciones
se mantiene constante, derivamos con respecto al tiempo:
Pág. 3
El primer término es nulo por tratarse del producto vectorial de dos vectores paralelos, con lo que
aplicando la definición de fuerza dada en la
segunda ley de Newton queda:
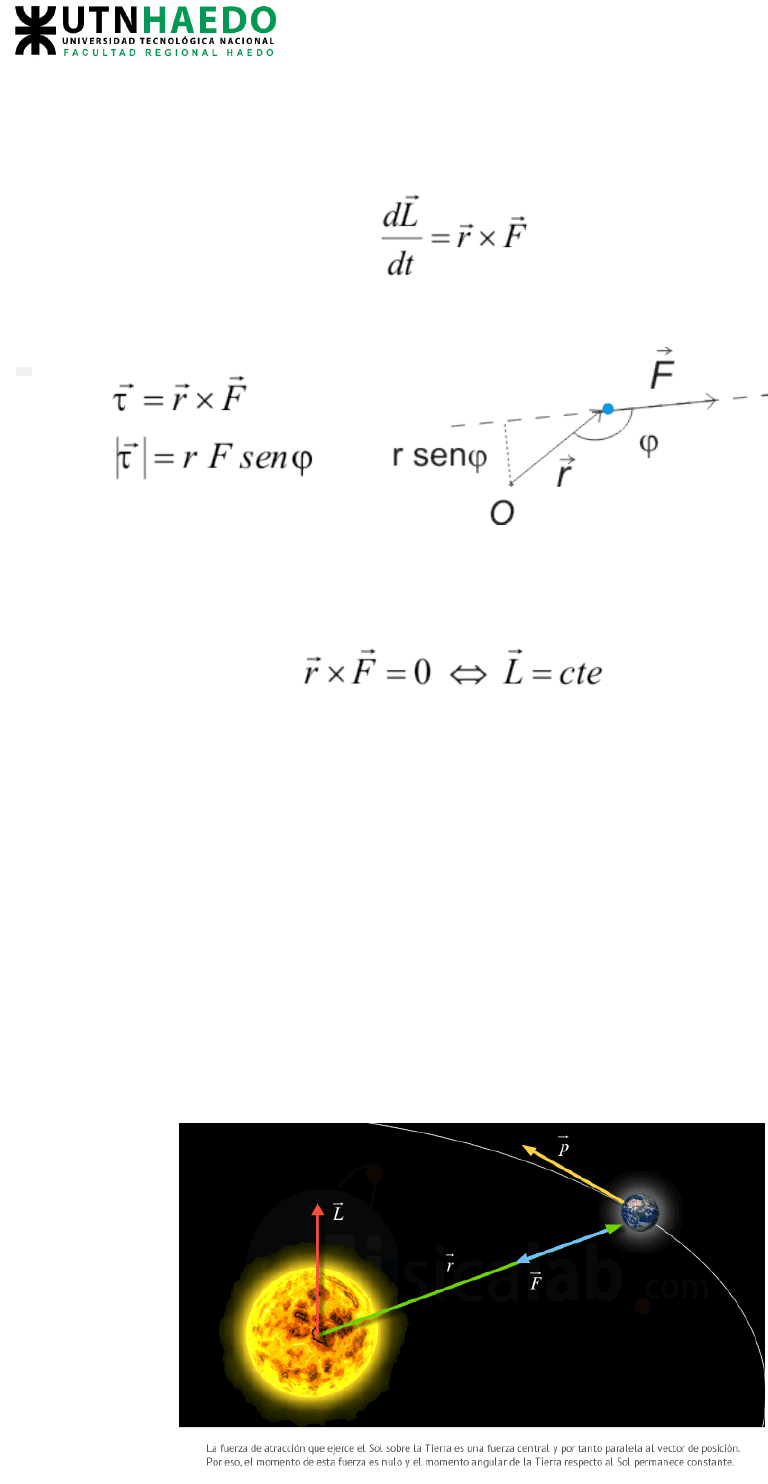
Este producto vectorial se denomina momento o torque de una fuerza (τ) con respecto al origen O:
El vector,
será constante cuando su derivada sea nula. Esto constituye el Teorema de Conservación
del Momento Angular:
Esta condición se cumple en dos casos:
• en el caso de una partícula libre, la fuerza a la que está sometida es nula por lo que no ejerce
momento y por tanto se mueve con L constante, además de con momento lineal constante
• cuando el vector posición es paralelo a la fuerza, el producto vectorial es nulo por lo
que L también es constante. Esto sucede en el caso de una fuerza central, es decir, que pasa
siempre por un punto fijo: el momento angular de una partícula sometida exclusivamente a
una fuerza central es constante. La fuerza gravitatoria es una fuerza central por lo que, por
ejemplo, la Tierra se mueve con respecto al Sol con L constante.
Pág. 4
Veamos las consecuencias que tiene este hecho:
La Tierra está sometida a la acción de una fuerza gravitatoria ejercida por el Sol. Esta fuerza es la
causante de que la trayectoria de la Tierra se curve, puesto que origina una aceleración normal o
centrípeta. La trayectoria que describe la Tierra es una elipse, estando el Sol en uno de los focos, pero
su excentricidad es de sólo 0.0167, es decir, es prácticamente circular. La posición más alejada del Sol
recibe el nombre de afelio y la más cercana perihelio: en el afelio la distancia entre el Sol y la Tierra es
aproximadamente de 152.6 millones de km y en el perihelio de 147.5 millones de km.
La fuerza gravitatoria que sufre la Tierra es
una fuerza central, ya que a lo largo de
toda la trayectoria su línea de acción pasa
siempre por el Sol. Entonces si tomamos
como origen el Sol, la fuerza gravitatoria
no hace momento con respecto al origen
por lo que, según el teorema
de conservación del momento angular y suponiendo que es la única fuerza externa que actúa, la Tierra
se mueve alrededor del Sol con momento angular constante.
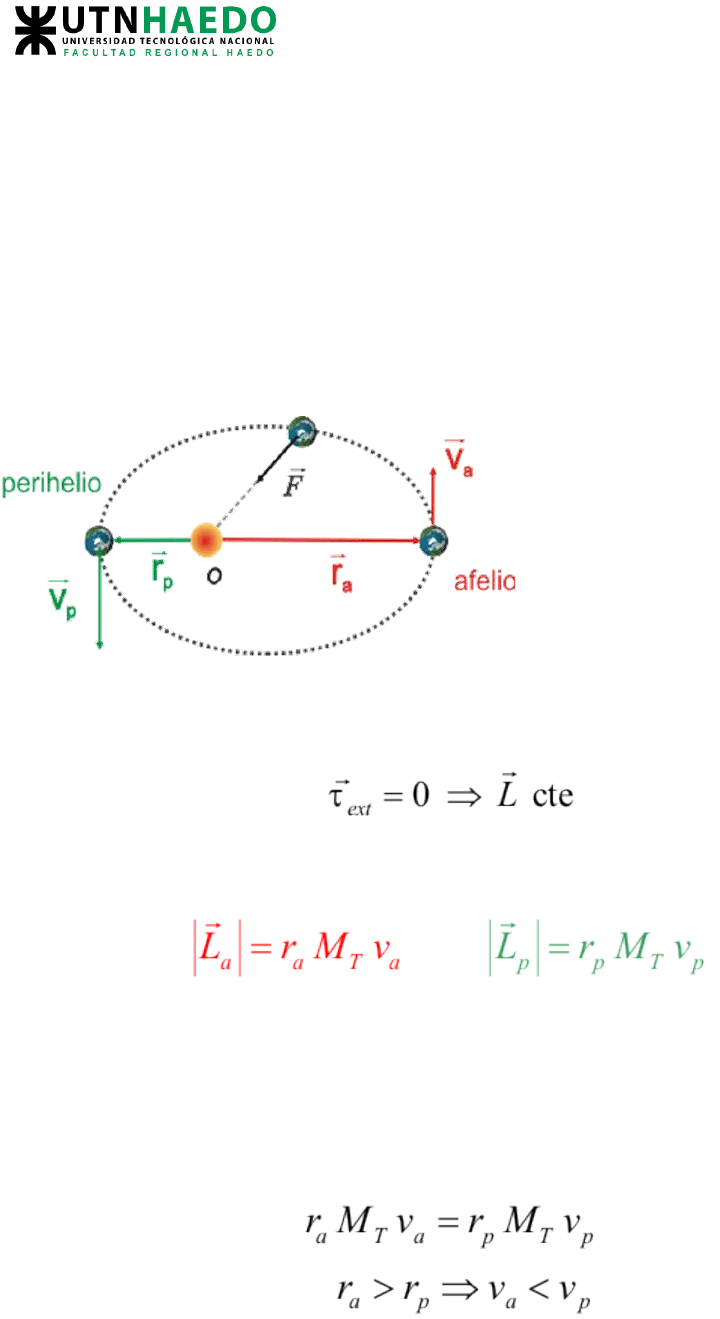
Calculamos el módulo del momento angular en el afelio y en el perihelio:
Igualando ambas expresiones y teniendo en cuenta que la distancia en el afelio r
a
es mayor que la
distancia en el perihelio r
p
se deduce que la velocidad de la Tierra en el afelio debe de ser menor que
la velocidad en el perihelio: en el perihelio la velocidad de traslación de la Tierra es 30,75 km/s y en el
afelio de 28,76 km/s.
La segunda Ley de Kepler es una consecuencia de este hecho:
"Cada planeta se mueve de tal manera que el radio vector (recta que une el centro del Sol con el
planeta) barre áreas iguales en tiempos iguales"
Pág. 5
ANALOGIAS ENTRE ROTACIONES Y TRASLACIONES
Traslaciones
Rotaciones
Una fuerza neta sobre una partícula
produce un cambio en el momento
lineal de la misma
Un torque neto sobre una partícula
produce un cambio en el momento
angular de la misma
Una fuerza neta actuando sobre una
partícula es igual a la razón de
cambio
temporal del momento lineal de la
partícula
Un torque neto actuando sobre una
partícula
es igual a la razón de cambio
temporal del
momento angular de la partícula
La fuerza neta es la responsable de
modificar la traslación de los
cuerpos, es decir, son el agente
dinámico de traslación
El torque neto es responsable de
modificar la rotación de los cuerpos,
es decir, el agente dinámico de
rotación
Pág. 6
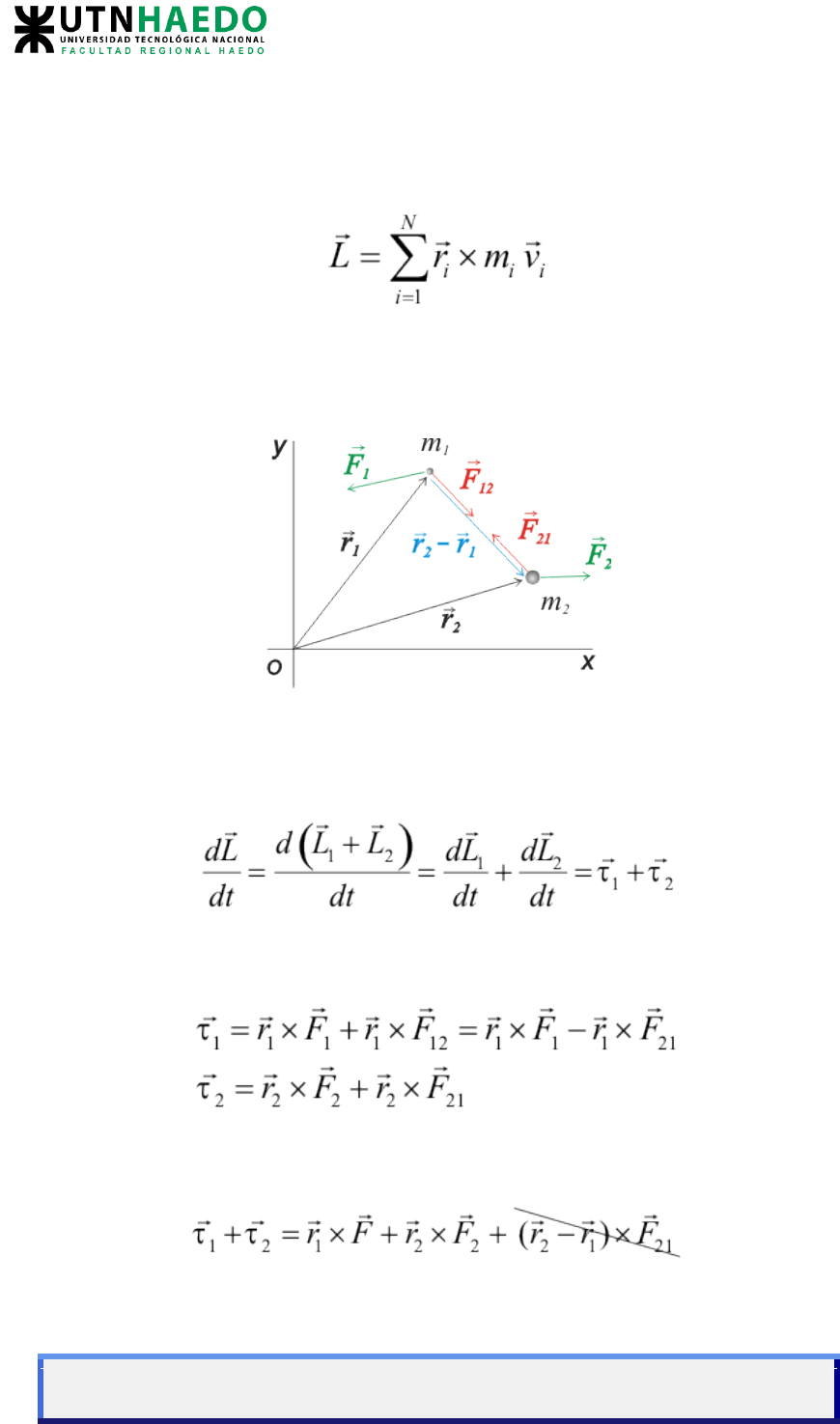
MOMENTO ANGULAR DE UN SISTEMA DE PARTICULAS
El momento angular de un sistema de partículas se define como la suma vectorial del momento
angular de cada una de ellas:
Supongamos un sistema formado por dos partículas sobre las que actúan fuerzas internas (en rojo) y
fuerzas externas (en verde):
Para saber bajo qué condiciones se conserva L, expresamos su derivada aplicando los conceptos vistos
en conservación del momento angular de una partícula:
Calculamos los momentos de las fuerzas que actúan sobre cada partícula, recordando que las fuerzas
internas tienen igual módulo y sentido opuesto:
Al sumar ambos, se anula el término correspondiente a las fuerzas internas ya que resulta un
producto vectorial de vectores paralelos, como se puede ver en el dibujo anterior:
Generalizando este caso para un sistema de más partículas, se puede afirmar que:
Las fuerzas internas no hacen variar el momento angular de un sistema
Pág. 7
Entonces expresamos la derivada de L como:
donde:
Es la
suma de los momentos de las fuerzas externas
El torque neto (con respecto a un eje que pase por un origen en un sistema de referencia inercial)
debido a las fuerzas externas que actúan sobre un sistema es igual al ritmo de variación del momento
angular total del sistema con respecto a dicho origen
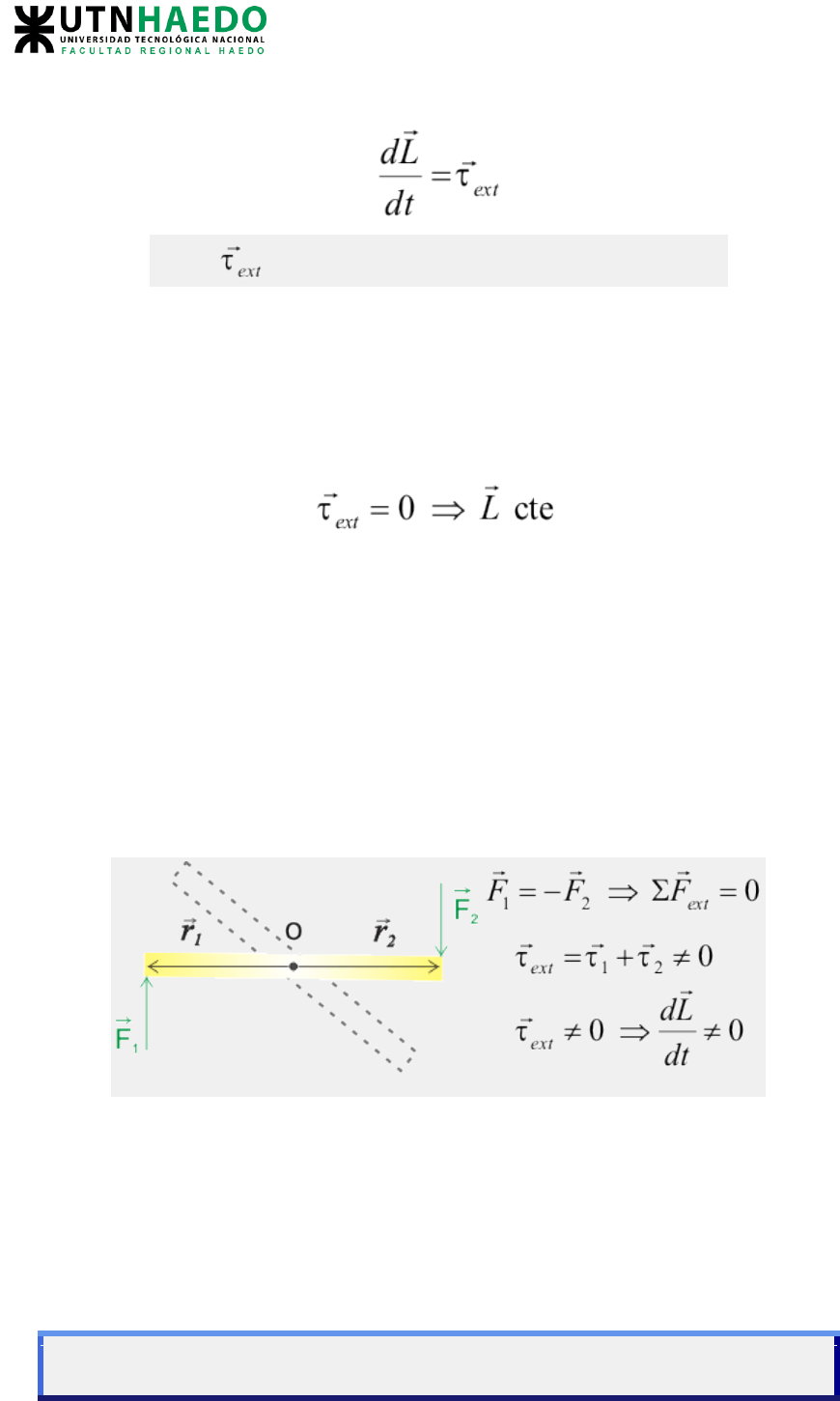
El Teorema de Conservación del Momento Angular para sistemas queda finalmente:
Es importante destacar que para calcular la suma de los momentos de las fuerzas externas es necesario
calcular el momento de cada una de las fuerzas y luego sumarlos todos vectorialmente, es decir, no
es válido sumar primero las fuerzas externas y luego calcular el momento de la resultante.
En el siguiente ejemplo se observa que la suma de las fuerzas externas es nula, pero los momentos
ejercidos por ambas fuerzas con respecto a O van en el mismo sentido, por lo que no se cancelan y
por tanto el momento angular del sistema no se conserva.
Las fuerzas externas se anulan, pero no la suma de los momentos. No se conserva el momento angular
del sistema.
Si el sistema está aislado (no sometido a fuerzas externas) es evidente que no hay momento de
dichas fuerzas luego:
En un sistema aislado se conserva el momento angular
Pág. 8
Esto quiere decir que si en un sistema aislado parte del sistema varía su momento angular debido a
fuerzas internas, el resto del sistema sufrirá una variación de momento que cancele la anterior, del
mismo modo que la conservación del momento lineal en sistemas aislados es la causante del retroceso
de un arma al disparar, por ejemplo.
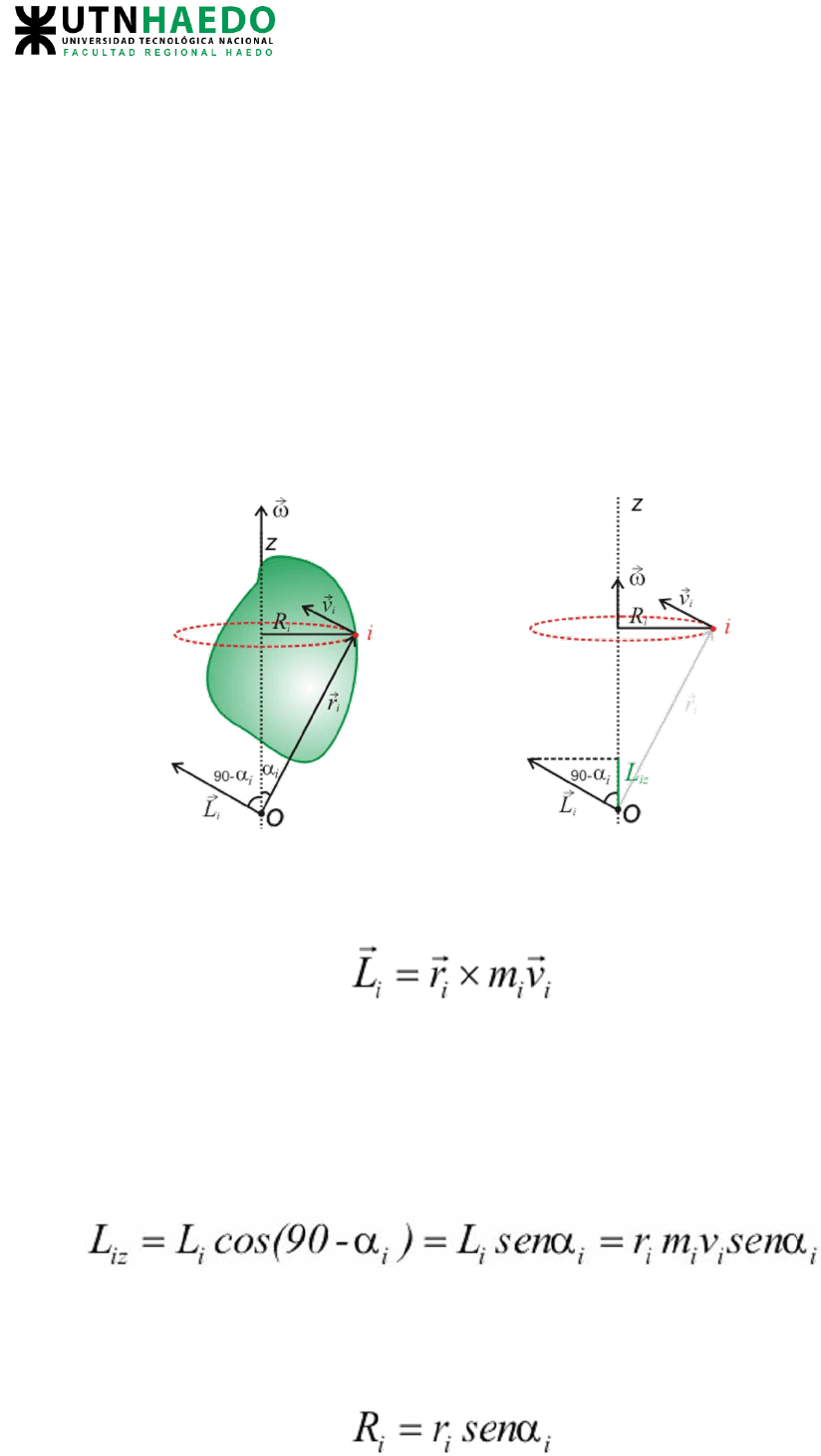
MOMENTO ANGULAR DE UN CUERPO RIGIDO
Consideremos un sólido de forma arbitraria que rota con velocidad angular ω con respecto a un
eje Z que, para simplificar, consideraremos fijo con respecto a un sistema de referencia inercial, tal y
como se muestra en la siguiente figura:
Cada partícula del sólido describe un movimiento circular con velocidad angular ω y su momento
angular calculado con respecto al origen O viene dado por:
El momento angular del sólido con respecto a O es simplemente el momento angular de un sistema
de partículas, es decir, la suma de los momentos angulares de todas las partículas del sistema.
Como veremos a continuación, es más interesante calcular la proyección del momento angular de la
partícula sobre el eje de giro, que viene dada por:
De las figuras anteriores se deduce que el radio de giro (R
i
) de la partícula i-ésima del sólido y la
velocidad lineal de dicha partícula son respectivamente:
Pág. 9
Sustituyendo en la ecuación anterior, la proyección del momento angular de la partícula i-ésima sobre
el eje de giro queda:
La proyección del momento angular del sólido rígido sobre el eje de giro L
z
será la suma de las
proyecciones de todas las partículas del sólido sobre dicho eje:
La sumatoria que aparece en la ecuación anterior es el momento de inercia I del sólido con respecto
al eje de giro.
1
Veremos su significado físico cuando obtengamos la ecuación del movimiento de
rotación de un sólido. Sus unidades en el Sistema Internacional son kg m
2
, y se define:
Finalmente, la proyección del vector momento angular del sólido es:
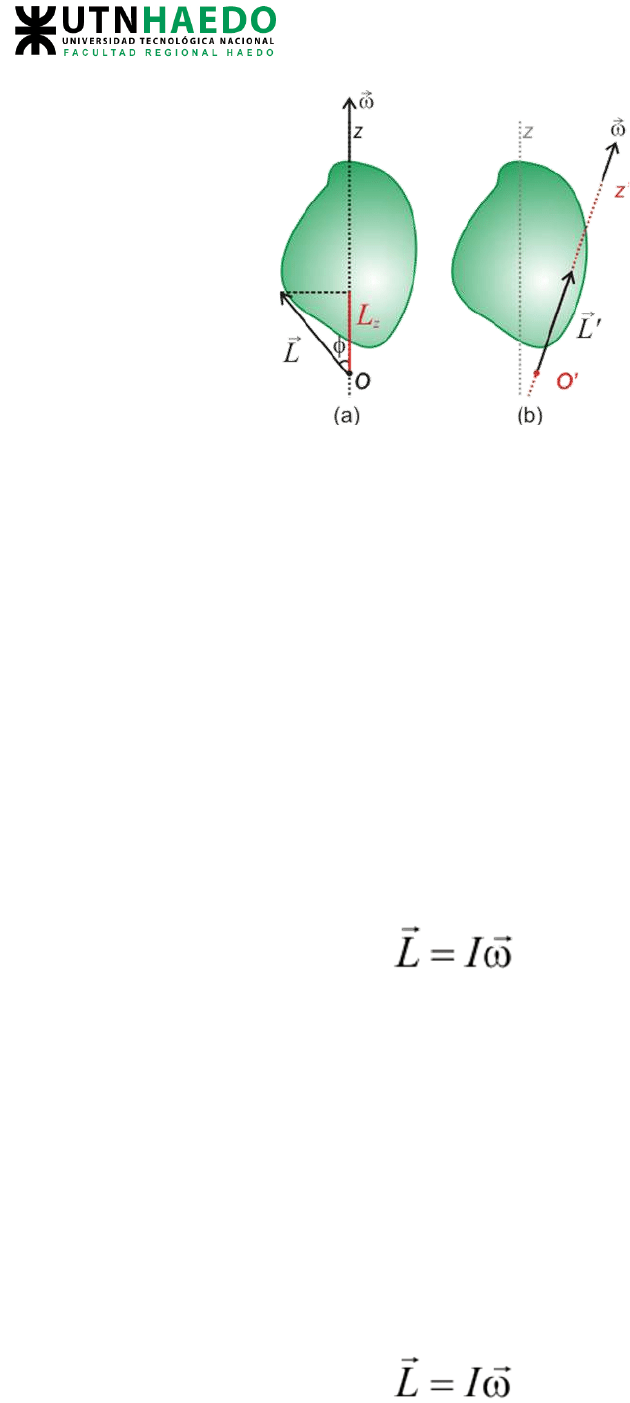
En general, el vector momento angular de un sólido con respecto a un determinado eje de giro no
tiene por qué ser paralelo a este último, por lo que la proyección de L sobre el eje no coincide con su
módulo.
1
En realidad, esa fórmula corresponde al momento de inercia de un sólido discreto, para una distribución
continua de masa la sumatoria se transforma en una integral
donde dm es un elemento de masa del sólido y R
2
su distancia al eje de giro de este.
Algunos valores se presentan en el apéndice 1.
Pág. 10
A la izquierda se ha representado el momento angular total de un sólido con respecto a
un eje de giro Z. La dirección del momento angular no coincide con la del eje. A la derecha,
se ha representado una situación hipotética en la que el vector L estaría alineado con el
eje de giro Z'.
Sin embargo, para cualquier sólido existen al menos tres ejes (denominados ejes principales de inercia)
tales que, si el sólido rota con respecto a alguno de ellos, el vector momento angular es paralelo al
eje y, por tanto la proyección de L sobre el eje coincide con su módulo (ver figura anterior). Cuando el
sólido tiene algún eje de simetría, los ejes principales de inercia coinciden con estos últimos.
Cuando un sólido rota con respecto a uno de sus ejes principales de inercia, el vector momento
angular del sólido viene dado por:
A partir de esta ecuación deduciremos la ecuación del movimiento de rotación de un sólido rígido con
respecto a uno de sus ejes principales de inercia.
ECUACION DE MOVIMIENTO PARA LA ROTACION DE UN CUERPO SOLIDO
El momento angular de un sólido rígido que rota con respecto a uno de sus ejes principales de inercia
(que por el momento supondremos fijo con respecto a un sistema de referencia inercial) viene dado
por:
donde I es el momento de inercia
del sólido y
es su velocidad angular.
Pág. 11
La variación del estado de rotación de un sólido viene determinada por la variación de su velocidad
angular por lo que, si queremos describir el movimiento de rotación debemos encontrar una ecuación
que nos permita calcular la aceleración angular del mismo.
Puesto que en la expresión del momento angular aparece la velocidad angular, derivándola
obtendremos la aceleración angular:
La variación del momento angular de un sistema de partículas (y, por tanto, de un sólido) es igual al
momento de las fuerzas externas que actúan sobre el sistema:
Igualando ambas expresiones,
Ésta es la ecuación del movimiento de rotación de un sólido rígido que, como puede observarse, es
análoga a la segunda ley de Newton.
El torque externo neto que actúa sobre un sólido rígido que rota alrededor de un eje fijo es igual al
momento de inercia con respecto al eje de rotación multiplicado por la aceleración angular del
objeto con respecto a ese eje
La segunda ley de Newton nos proporciona un modo de calcular la aceleración de una partícula (o del
centro de masas de un sistema de partículas) conociendo las fuerzas que actúan sobre ella. La ecuación
del movimiento de rotación de un sólido nos permite determinar su aceleración angular calculando
el momento de las fuerzas externas que actúan sobre él.
Para que un cuerpo rote (para que tenga aceleración angular) no basta con que actúen fuerzas externas
sobre él, sino que estas fuerzas han de tener momento resultante no nulo.
Pág. 12
El papel que juega la masa de una partícula en la segunda ley de Newton (su inercia, es decir, la
resistencia que opone a cambiar su estado de movimiento), lo desempeña ahora el momento de
inercia.
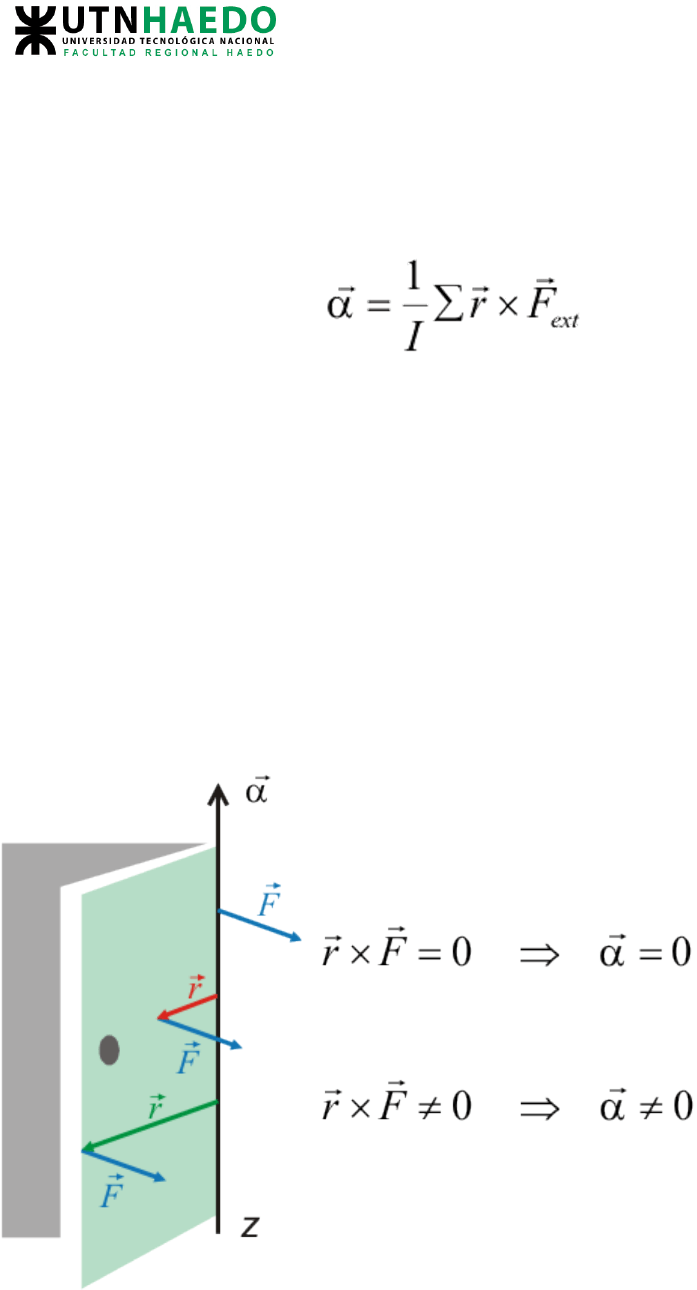
Despejando α, se obtiene:
Es decir, para un momento de fuerzas dado, cuanto mayor sea el momento de inercia del sólido menor
será su aceleración angular, por lo que la velocidad angular del mismo variará más lentamente.
El momento de inercia mide la resistencia que opone un cuerpo a variar su estado de movimiento
de rotación.
De la ecuación anterior se deduce que el vector aceleración angular es paralelo a la resultante de los
momentos de las fuerzas externas, del mismo modo que la aceleración de una partícula es paralela a
la resultante de las fuerzas que actúan sobre ella.
Cuanto mayor sea el módulo de esta resultante, mayor será el módulo de la aceleración angular.
En el siguiente ejemplo se analiza el movimiento de rotación de una puerta utilizando la ecuación del
movimiento de rotación.
Si para abrirla aplicamos la fuerza directamente sobre la bisagra,
la puerta no se abrirá, ya que en este caso:
Para que la puerta se abra es necesario aplicar la fuerza a una
cierta distancia de la bisagra, puesto que de este modo:
Cuanto mayor sea el módulo de r mayor será el momento de la
fuerza F y por tanto mayor será la aceleración angular. Por eso es
más fácil abrir una puerta cuanto más lejos de la bisagra
aplicamos la fuerza.
Si la fuerza se aplica en una dirección paralela al vector r la puerta no se abrirá, ya que en este caso el
momento de la fuerza será nulo y no habrá aceleración angular.
Pág. 13
Cuando el momento de una fuerza que actúa sobre un cuerpo en un punto es distinto de cero, los
puntos del sólido realizarán una rotación sobre el eje de giro. La velocidad de todos los puntos es la
misma,
. Mientras actúe la fuerza el movimiento será acelerado, con aceleración angular
EJEMPLO: El señor de la figura aplica una fuerza constante sobre la
polea de 40 N. Determina su velocidad angular al cabo de 10
segundos sabiendo que el radio de la polea es de 12 cm, la masa es
de 2 kg y el momento de inercia de una polea se puede aproximar
por la expresión I = m·r
2
/2
La fuerza que ejercemos se traslada a la polea a través de la cuerda con lo cual es responsable, a través
de un momento de fuerza, de su giro. El valor de dicho momento viene dado por:
=
= . = 0.12. 40= 4.8 . (dirección y sentido: entrante de la hoja, la polea gira
en sentido horario)
Debemos determinar, en primer lugar, la aceleración angular de la polea, a partir de la ecuación
fundamental de la dinámica de rotación:
Entonces: 4.8. =
. 2. 0.12
.
.
333.3
=
Por tanto, la velocidad angular al cabo de 10 segundos será:
w(t) = ω
0
+ αt = 333.310 rad/s = 3333 rad/s
CONSERVACION DEL MOMENTO ANGULAR
El momento angular total de un sistema es constante, tanto en dirección como en módulo si el
torque neto debido a las fuerzas externas se anula
=
=
=
=
Pág. 14
Si la masa de un sistema aislado que rota sufre una redistribución, el momento de inercia cambia.
Como la magnitud del momento angular del sistema es
La ley de conservación del momento angular requiere que el producto de I por ω permanezca
constante
Es decir, para un sistema aislado, un cambio en I requiere un cambio en ω
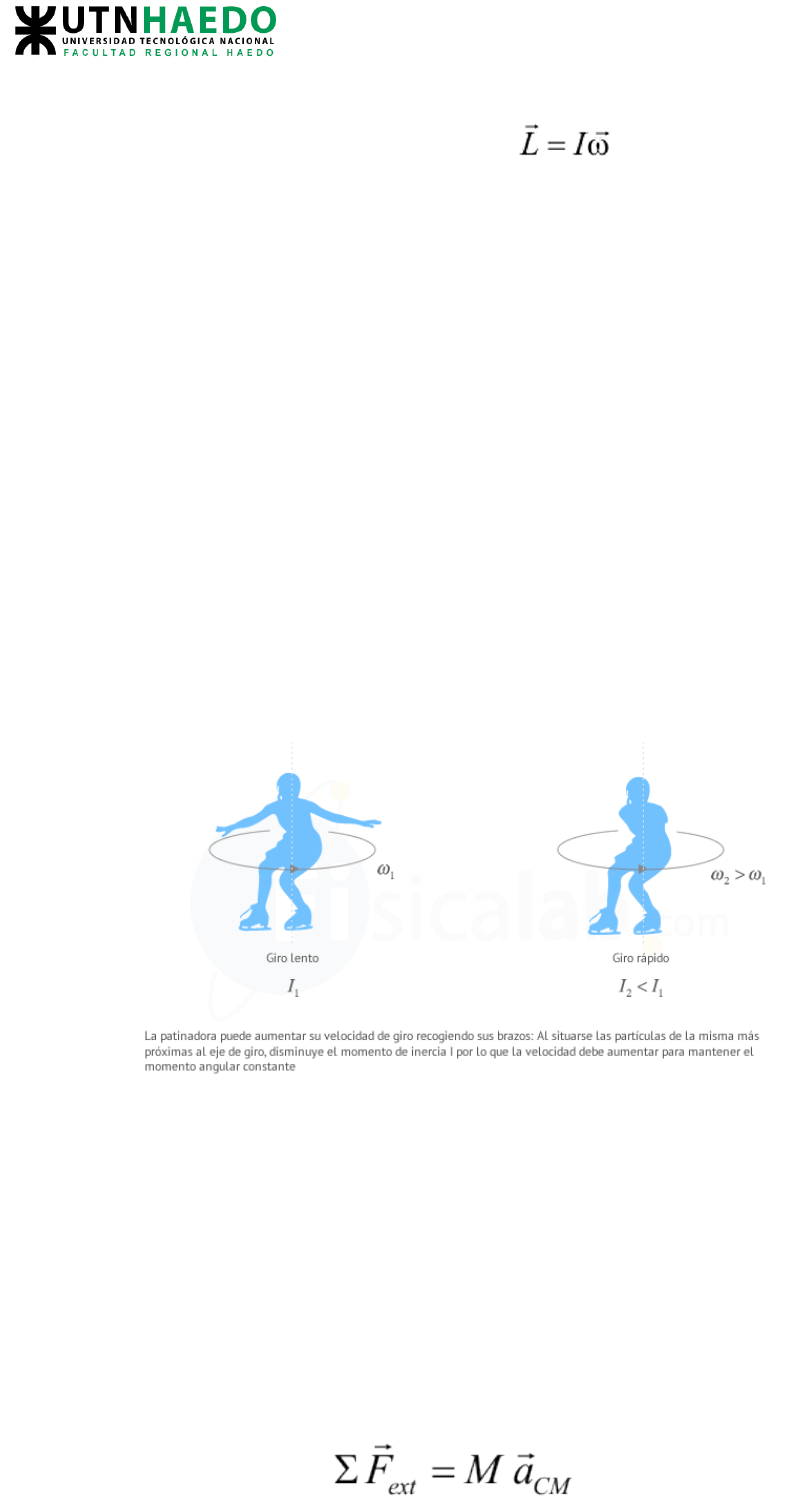
Una patinadora que mientras gira recoge sus brazos es un ejemplo interesante. Al recoger sus brazos
la distribución de masas respecto al eje varía: toda la masa se concentra más cerca del mismo por lo
que el momento de inercia disminuye. En el movimiento de plegar los brazos no son necesarios
momentos de fuerza, por lo que el momento angular permanece constante. Observa qué ocurre
entonces:
(
.
)
=
(
.
)
Esto significa que, dado que I
2
es menor que I
1
, la velocidad angular ω2 debe ser mayor que ω1. Es
decir, cuando el patinador pliega sus brazos, su velocidad angular aumenta.
ROTACION CON RESPECTO AL CENTRO DE MASAS
Cuando el eje de rotación de un sólido no está fijo, su movimiento será una combinación de rotación
y traslación, como está descrito en la introducción. En este caso, para describir el movimiento son
necesarias dos ecuaciones: una que nos permita calcular la aceleración de su centro de masas y otra
que nos dé su aceleración angular con respecto a un eje que pasa por el centro de masas.
La primera de ellas es la segunda ley de Newton aplicada a un sistema de partículas:
Pág. 15
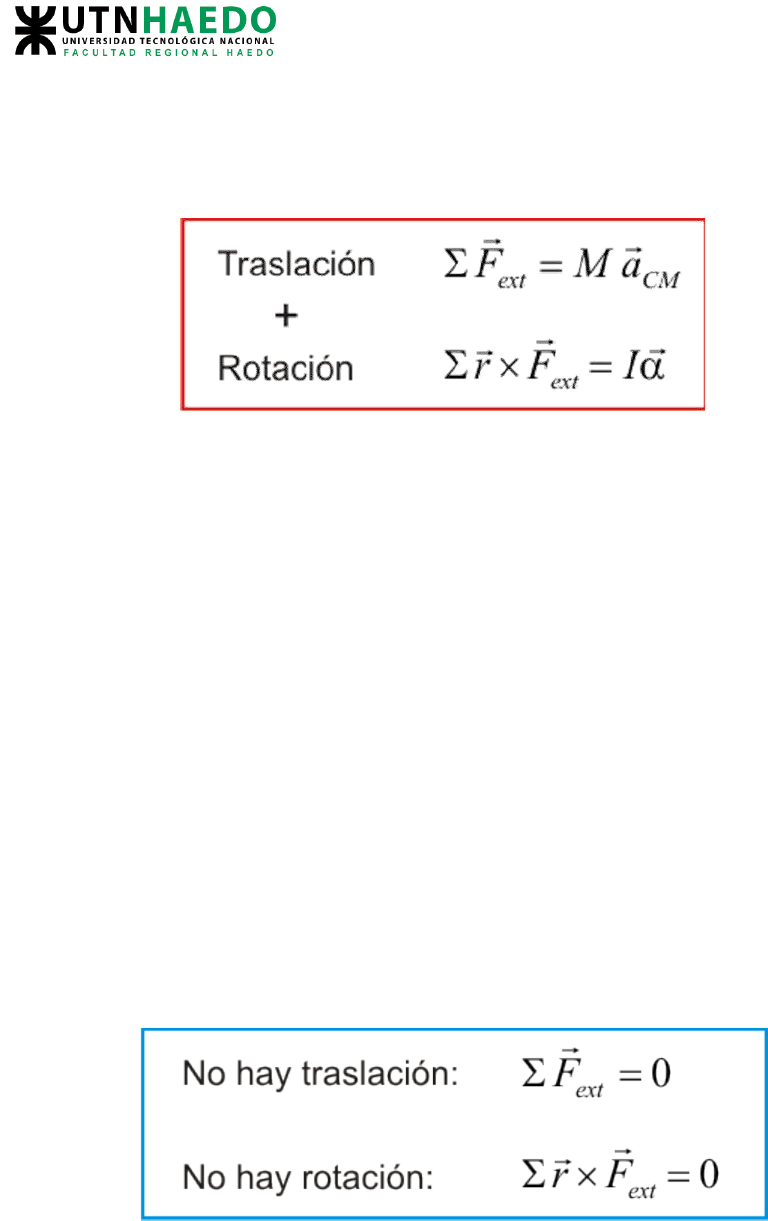
Y la segunda es la ecuación del movimiento de rotación pero referida al centro de masas del sólido.
En el siguiente cuadro se resume el modo de analizar el movimiento de un sólido rígido:
EQUILIBRIO ESTATICO
Una aplicación directa de las ecuaciones anteriores es la estática, cuyo objetivo es determinar en qué
condiciones un sistema se encuentra en reposo. Su aplicación más importante es al cálculo de
estructuras, donde se emplea para determinar las fuerzas soportadas por un puente, un edificio, una
viga, un rascacielos, etc.
Para que un cuerpo esté en equilibrio estático deben cumplirse simultáneamente dos condiciones:
• Que el sólido no se traslade: la aceleración de su centro de masas debe ser cero.
• Que el sólido no rote: la aceleración angular del sólido debe ser también nula.
Estas dos condiciones se imponen respectivamente a la ecuación del movimiento de traslación del
centro de masas (segunda ley de Newton) y a la ecuación de la rotación:
La segunda condición se cumple con independencia del origen que se elija para calcular los
momentos de las fuerzas externas. Resolviendo el sistema de ecuaciones anterior se calculan las
fuerzas que actúan sobre el sistema en equilibrio.
Este documento contiene más páginas...
Descargar Completo
cinematica del cuerpo rigido.pdf
 Estamos procesando este archivo...
Estamos procesando este archivo...
 Lamentablemente la previsualización de este archivo no está disponible. De todas maneras puedes descargarlo y ver si te es útil.
Lamentablemente la previsualización de este archivo no está disponible. De todas maneras puedes descargarlo y ver si te es útil.
Descargar
Estamos procesando este archivo...
Lamentablemente la previsualización de este archivo no está disponible. De todas maneras puedes descargarlo y ver si te es útil.