Posición, velocidad y aceleración en coordenadas polares
En movimientos curvilíneos en general es práctico el uso de coordenadas polares,
más que el de coordenadas cartesianas. Este sistema de coordenadas es particularmente útil
en el caso de movimientos en un plano. Se pueden definir de varias formas. Vamos a
adoptar la siguiente (ver figuras):
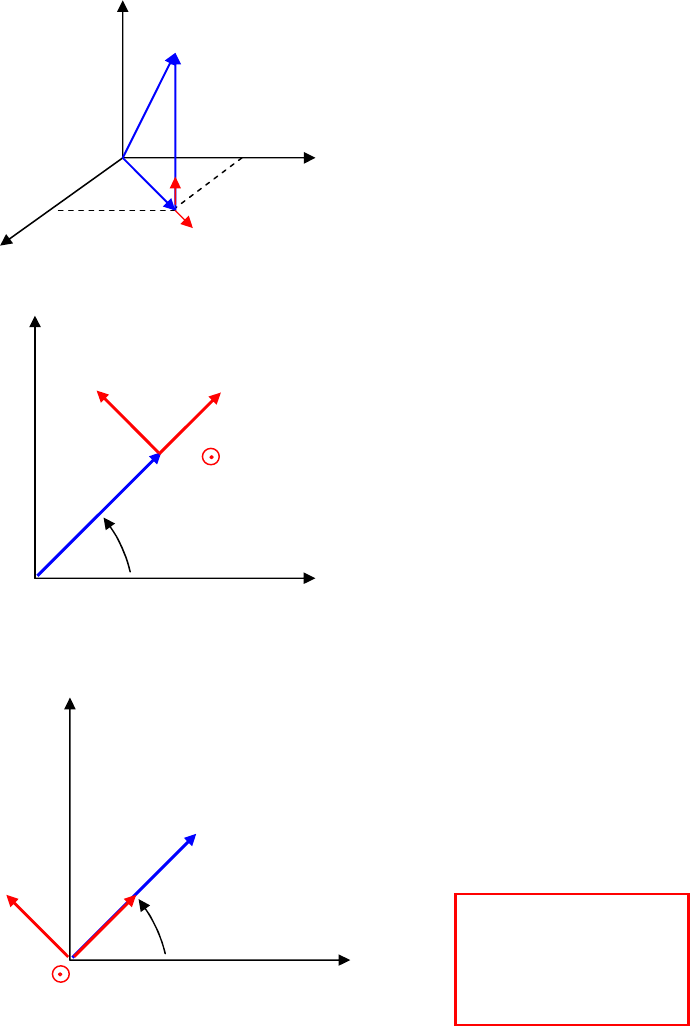
• Definimos el versor
r
ˆ
con la dirección de la
proyección del vector posición
R
r
en el plano,
r
r
, y sentido saliente. Notar que llamamos
r
r
a
la proyección en el plano del vector posición
R
r
.
En caso de un movimiento plano,
R
r
r
r
≡
(no hay
componente en la dirección z)
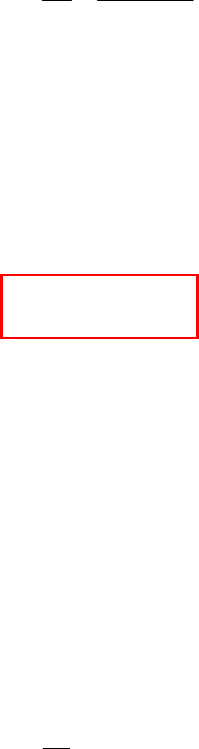
• Definimos el versor
θ
ˆ
perpendicular a
r
r
y
con el sentido definido por el ángulo
θ
creciente, donde
θ
es el ángulo entre el eje x y
el vector
r
r
.
• La tercera dimensión queda definida por el
versor
z
ˆ
de tal manera que
(
)
zr
ˆ
,
ˆ
,
ˆ
θ
formen terna
directa.
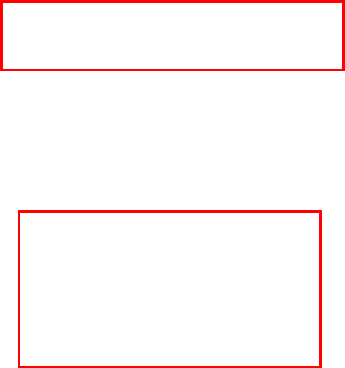
• Para encontrar la relación entre los versores
polares y los versores cartesianos, corremos los
versores polares al origen de las coordenadas
cartesianas.
Proyectando:
r
r
r
ˆ
θ
θ
ˆ
x
y
z
ˆ
r
r
r
ˆ
θ
θ
ˆ
x
y
z
ˆ
z
z
ysenx
senyxr
ˆ
ˆ
cos
ˆˆ
ˆ
ˆ
cos
ˆˆ
=
+−=
+
=
θθθ
θ
θ
r
r
z
ˆ
r
ˆ
z
r
R
r
z
y
x
De acuerdo con esta elección, el vector posición queda descrito en este sistema de
coordenadas:
z
z
r
r
R
ˆ
ˆ
+
=
r
Vamos a encontrar las expresiones de la velocidad
v
r
y la aceleración
a
r
en este sistema de
coordenadas, derivando la expresión de
R
r
. Notar que
r
ˆ
y
θ
ˆ
, a diferencia de los versores
cartesianos, no son versores fijos, es decir, se mueven siguiendo el movimiento del vector
posición. Por lo tanto, dependen del tiempo y deben derivarse.
zzrrrr
dt
zzrrd
dt
Rd
v
ˆ
ˆˆ
)
ˆ
ˆ
(
&
&
&
r
r
++=
+
==
Tenemos que encontrar
r
&
ˆ
. Para ello, derivemos las expresiones de los versores en
cartesianas:
rsenyxsenyx
ysenxysenxr
ˆ
)
ˆ
cos
ˆ
(
ˆ
cos
ˆ
ˆ
ˆ
cos
ˆˆ
(cos
ˆˆˆ
θθθθθθθθθ
θθθθθθθθθ
&&&&
&
&&&&
&
−=+−=−−=
=+−=+−=
Entonces:
La velocidad queda expresada como la suma de tres términos:
r
r
ˆ
&
(velocidad radial), da cuenta del movimiento en la dirección radial (
r
r
puede variar
en módulo).
θθ
ˆ
&
r
(velocidad en
θ
), da cuenta de los cambios de dirección de
r
r
z
z
ˆ
&
(velocidad en z), es idéntico a la componente de la velocidad en cartesianas. Este
término es nulo si el movimiento es en un plano.
• Vamos a encontrar la aceleración, como siempre, derivando la expresión de la
velocidad.
zzrrrrrrr
dt
vd
a
ˆ
ˆˆˆ
ˆˆ
&&
&
&&&&
&
&
&&&
r
r
+++++==
θθθθθθ
Teniendo en cuenta las expresiones de las derivadas de los versores:
zzrrrrrrra
ˆ
ˆ
ˆˆˆ
ˆ
2
&&
&&&&
&
&
&&&
r
+−+++=
θθθθθθθ
zzrrrv
ˆ
ˆ
ˆ
&
&
&
r
++=
θθ
Agrupando los términos:
En el caso que el movimiento sea en un plano, no hay componente en la dirección z, y
entonces resulta:
-------------------------------------
(
)
(
)
zzrrrrra
ˆ
ˆ
2
ˆ
2
&&
&&&
&
&
&&
r
+++−=
θθθθ
r
r
R
ˆ
=
r
θθ
ˆ
ˆ
&
&
r
rrrv +=
(
)
(
)
θθθθ
ˆ
2
ˆ
2
&&&
&
&
&&
r
rrrrra ++−=

coordenadas polares.pdf
 Estamos procesando este archivo...
Estamos procesando este archivo...
 Lamentablemente la previsualización de este archivo no está disponible. De todas maneras puedes descargarlo y ver si te es útil.
Lamentablemente la previsualización de este archivo no está disponible. De todas maneras puedes descargarlo y ver si te es útil.
Descargar
Estamos procesando este archivo...
Lamentablemente la previsualización de este archivo no está disponible. De todas maneras puedes descargarlo y ver si te es útil.