Tema 2: Deformaciones
Tema 2 : DEFORMACIONES
1
O
u
1
u
2
u
3
ε
1
ε
2
ε
3
δ
1
δ
2
δ
3
γ
1
/2
γ
2
/2
γ
3
/2
F
1
F
3
F
2
F
n
Tema 2: Deformaciones
2.1.- INTRODUCCIÓN
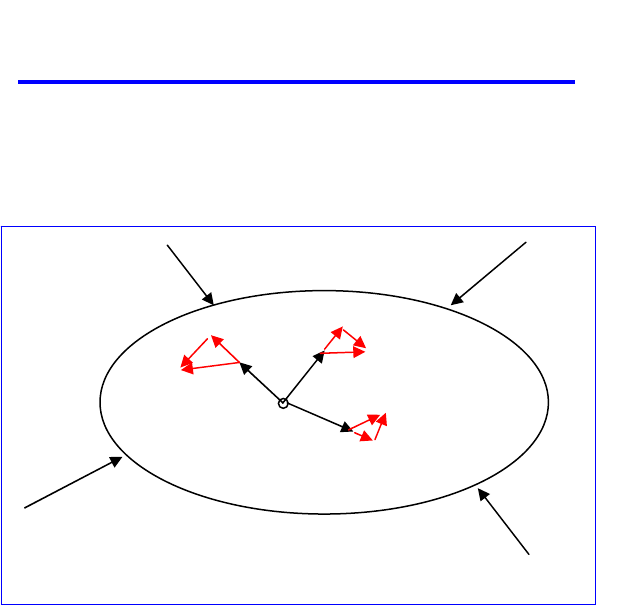
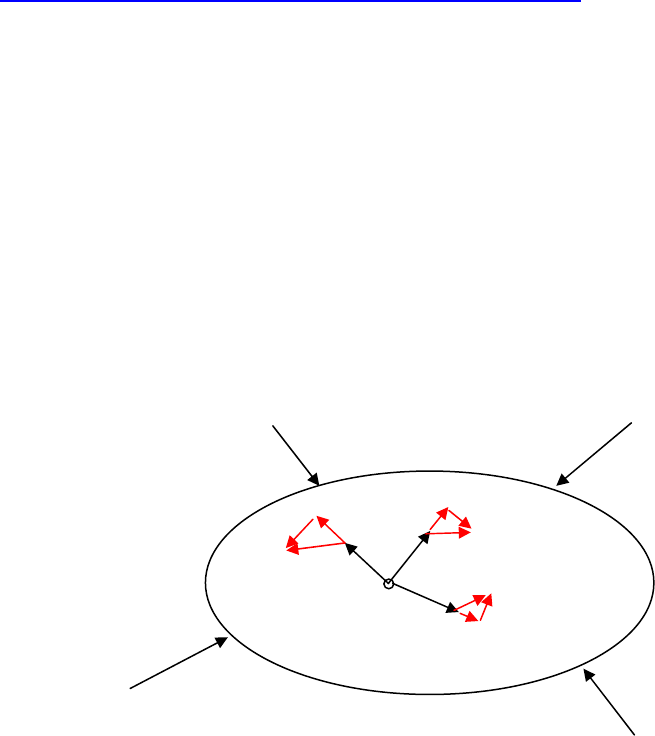
Los cuerpos se deforman debido a la acción de las fuerzas aplicadas. Para conocer la
deformación de un cuerpo es preciso conocer primero la deformación de uno cualquiera
de los paralelepípedos elementales que lo forman.
Veremos a continuación cómo la deformación de un paralelepípedo elemental se puede
descomponer e cuatro partes:
1º.- Una TRASLACIÓN que lleva el origen del paralelepípedo del punto O al punto O´
F
3
F
1
y
x
O
F
n
F
5
F
4
O´
z
F
2
Fig. 2.1
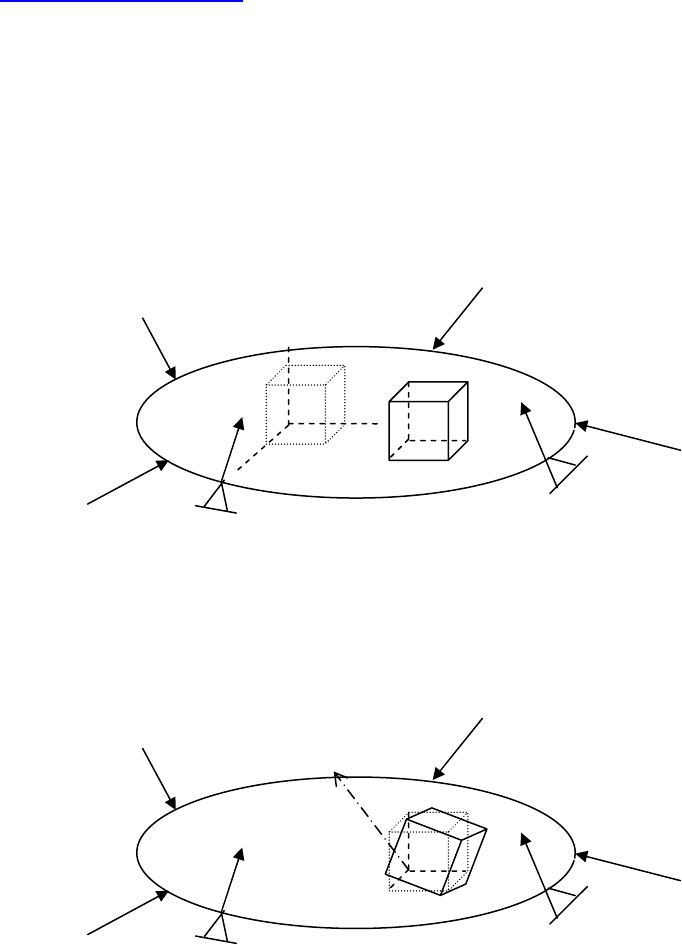
2º.-Una ROTACIÓN del paralelepípedo alrededor de un eje que pasa por O´
F
3
2
Estas dos primeras partes van a originar el movimiento del paralelepípedo, pero sin
deformarse
F
1
F
2
F
n
F
4
F
5
O´
Eje Rotación
Fig. 2.2
Sección 2.1: Introducción
3º.-Unas DEFORMACIONES LINEALES de las aristas del paralelepípedo
F
3
F
1
3
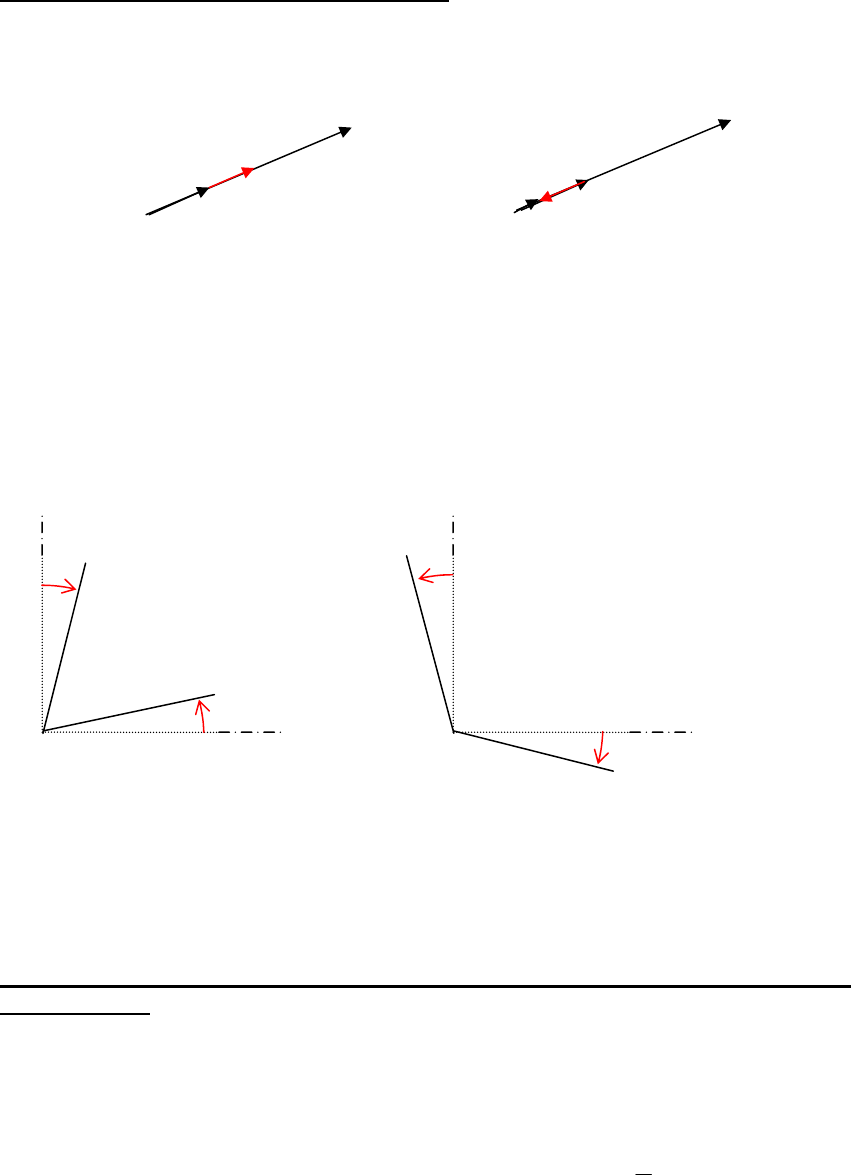
4º.- Unas DEFORMACIONES ANGULARES “SIMÉTRICAS” de los ángulos que
forman las aristas del paralelepípedo, inicialmente a 90º.
Estas dos últimas partes son las que originan la deformación propiamente dicha del
paralelepípedo.
Observación:
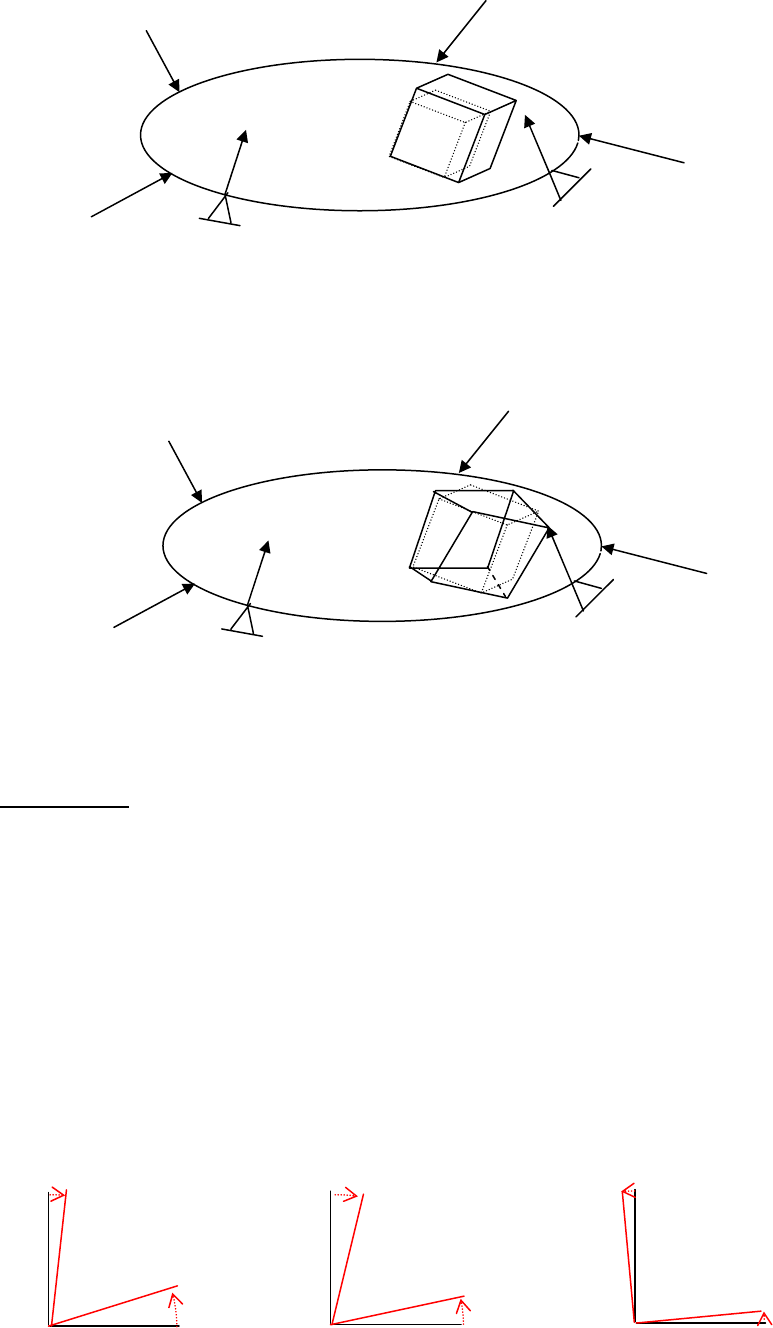
En la 4ª parte nos hemos referido a Deformaciones Angulares “Simétricas”. El por qué
de ello lo veremos a continuación:
Supongamos la cara del paralelepípedo contenida en el plano XOY y supongamos, por
ejemplo, que la arista OA gira 4º en sentido antihorario y la arista OB gira 2º en sentido
horario. Estas deformaciones angulares las podemos obtener como suma de dos
acciones: en una primera acción hacemos girar las aristas el mismo ángulo, lo que
denominaremos deformación angular simétrica, que sería la media aritmética de las dos,
o sea: 3º y en la segunda acción completamos la deformación angular inicial, con lo cual
la arista OA habría que girarla 1º mas en sentido antihorario y la arista OB restarla 1º,
osea, girarla 1º en sentido horario. Ésta acción sería una rotación
F
2
F
n
F
5
F
4
O´
Fig. 2.3
F
3
F
1
F
2
F
n
F
5
F
4
O´
Fig. 2.4
= +
O
O
O
A A
A
B
B
B
1º
2º
3
º
deformación
deformación
rotación
angular
angular simétrica
4º
3º
1º
Tema 2: Deformaciones
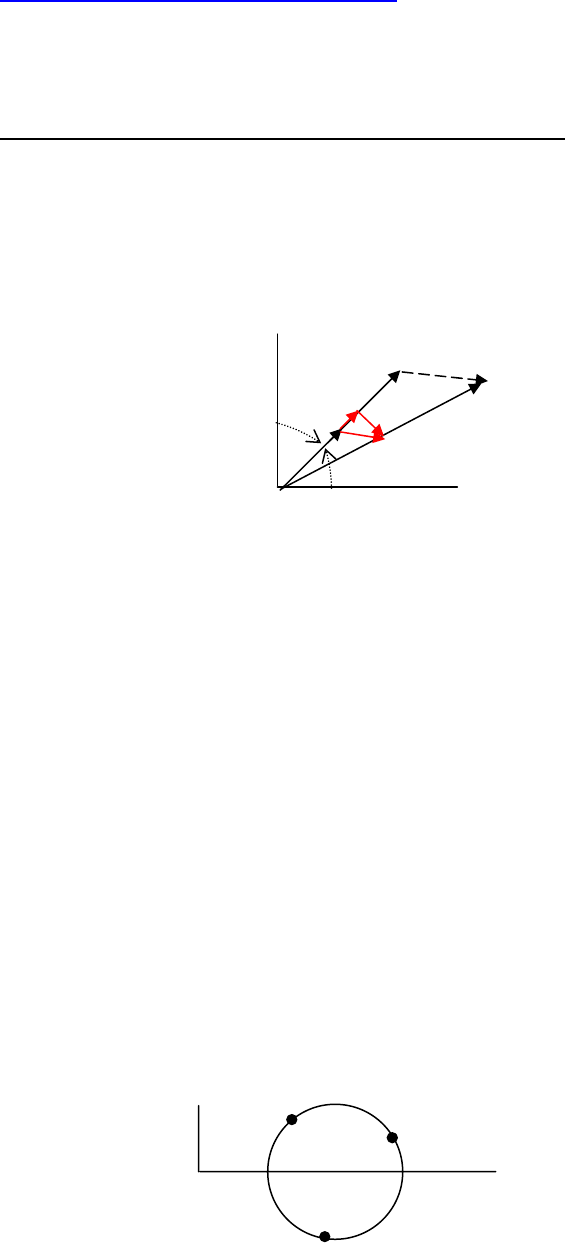
2.2.- CONCEPTO DE DEFORMACIÓN
Como consecuencia de la deformación propiamente dicha del paralelepípedo:
deformaciones lineales y deformaciones angulares simétricas, el vértice D del
paralelepípedo experimentará el desplazamiento DD´, con lo cual el elemento lineal
OD, modifica su longitud y gira un ángulo transformándose en el elemento lineal OD´.
4
y
D
D´
Definición
: Se denomina DEFORMACIÓN UNITARIA (δ) del elemento lineal OD, al
cociente entre el desplazamiento sufrido por su extremo: DD´ y la longitud del elemento
lineal: OD, es decir:
Si observamos la fig.2.5. se ve que δ es el desplazamiento que sufre el vector unitario
OD
o
en la dirección del elemento lineal OD. En efecto, por semejanza de triángulos
ODD´y OD
o
D
o
´ se obtiene:
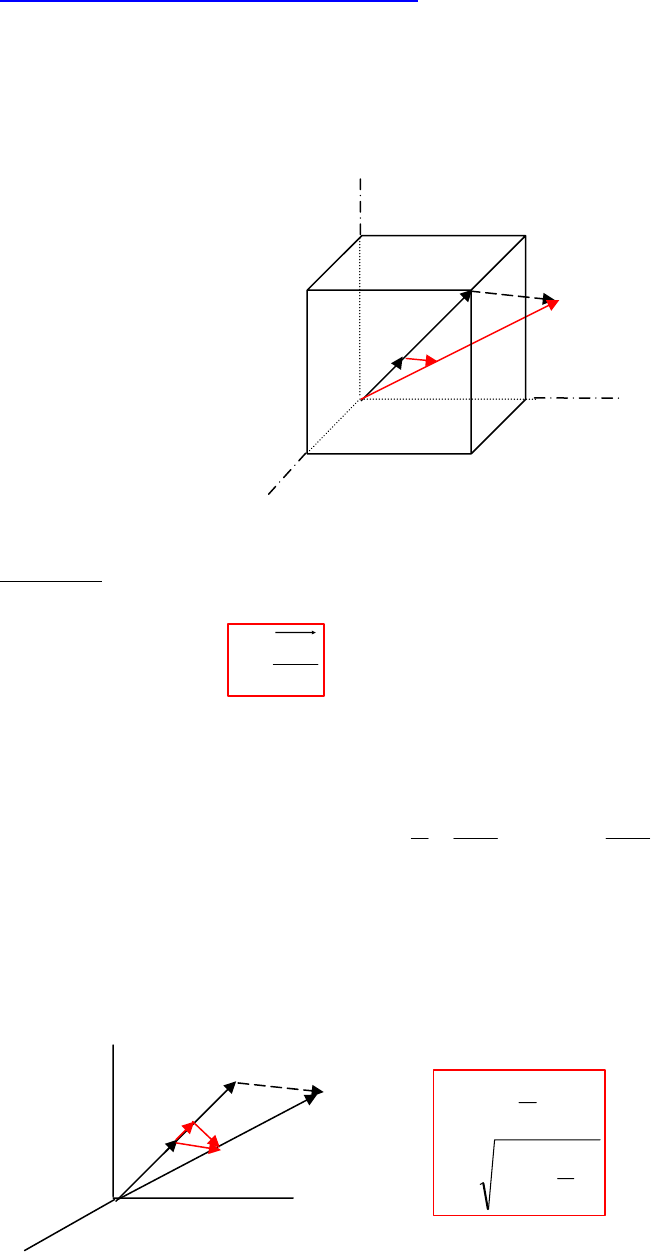
Descompondremos a continuación el vector δ en dos componentes: una sobre la propia
dirección del elemento lineal OD, a la que denominaremos:
DEFORMACIÓN
LONGITUDINAL UNITARIA (ε)
y otra en dirección perpendicular al elemento lineal
OD, a la que denominaremos:
DEFORMACIÓN ANGULAR UNITARIA (γ/2). Se
cumplirá:
O
x
z
Fig. 2.5
1
D
o
δ
D
o
´
OD
DD´
=
δ
r
(2.1)
OD
DD
OD
DD ´´
1
=→=
δ
δ
y
D
2
2
2
2
⎟
⎠
⎞
⎜
⎝
⎛
+=
+=
γ
εδ
γ
εδ
r
r
r
D´
γ
/2
D
o
ε
(2.2)
D
o
´
1
δ
x
O
z
Fig. 2.6
Sección 2.2: Concepto de deformación
2.3.- ESTADO DE DEFORMACIONES EN UN PUNTO
Como se verá a continuación, va a existir una analogía entre el Estado de Tensiones y el
Estado de Deformaciones
Tal y como se vió en 1.3 que……………..”a cada superficie S que pase por un punto O
de un sólido le corresponde una tensión ρ, con componentes:
σ (tensión normal) y τ
(tensión cortante)”……………..y “al conjunto de todas las tensiones que pueda haber
en un punto O se las denomina: Estado de Tensiones del punto O”
En el caso de las deformaciones va a ocurrir algo similar:
“A cada elemento lineal que pasa por un punto O de un sólido le corresponde una
deformación unitaria
δ, con componentes: ε (deformación longitudinal unitaria) y γ/2
(deformación angular unitaria).”
5
“Al conjunto de todas las deformaciones que pueda haber en el punto O sw le
denomina: Estado de Deformaciones del puno O”
Siguiendo con dicha analogía, vimos en 1.3 que…………….”de las infinitas Tensiones
que puede haber en un punto O correspondientes a las infinitas superficies que pasan
por él, conocidas 6 de ellas: σ
x
, σ
y
, σ
z
, τ
xy
, τ
yz
, τ
zx
, denominadas componentes del
estado de tensiones en el punto O, podremos conocer todas las demás a través de la
ecuación (1.9):
Pues bien, en el caso de las Deformaciones ocurrirá algo similar y así podremos decir:
“De las infinitas Deformaciones que puede haber en un punto O, correspondientes a las
infinitas direcciones de elementos lineales que puedan pasan por él, conocidas 6 de
ellas:
ε
x
, ε
y
, ε
z
, γ
xy
, γ
yz
, γ
zx
, denominadas componentes del estado de deformaciones en el
punto O
, podremos conocer todas las demás, a través de una ecuación matricial, que
como ahora se verá, será similar a la de las tensiones (1.9).”
O
u
1
u
2
u
3
ε
1
ε
2
ε
3
δ
1
δ
2
δ
3
γ
1
/2
γ
2
/2
γ
3
/2
F
1
F
3
F
2
F
n
Fig. 2.7
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
=
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
γ
β
α
σττ
τστ
ττσ
ρ
ρ
ρ
cos
cos
cos
.
zyzxz
zyyxy
zxyxx
z
y
x
Tema 2: Deformaciones
Sea un punto O del interior de un sólido en el que se suponen conocidas las 6
componentes del estado de deformaciones:
ε
x
, ε
y
, ε
z
, γ
xy
, γ
yz
, γ
zx
y sea OD un elemento
lineal cuya deformación unitaria
δ se desea conocer.
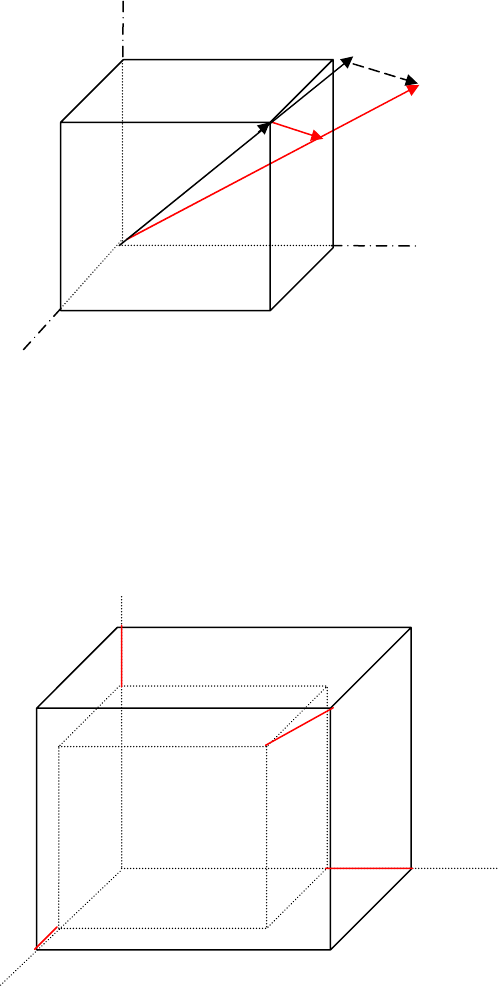
La dirección del elemento lineal OD la definiremos por su vector unitario: u = OD
o
,
dado por sus cosenos directores: u (cos α, cos β, cos γ). Construyamos ahora un
paralelepípedo con diagonal entre vértices opuestos OD
o
= 1 (ver fig.2.8). El
paralelepípedo así construido tendrá por aristas: cos α (en dirección del eje OX), cos β
(en dirección del eje OY) y cos γ (en dirección del eje OZ).
y
D
D´
6
D
o
δ
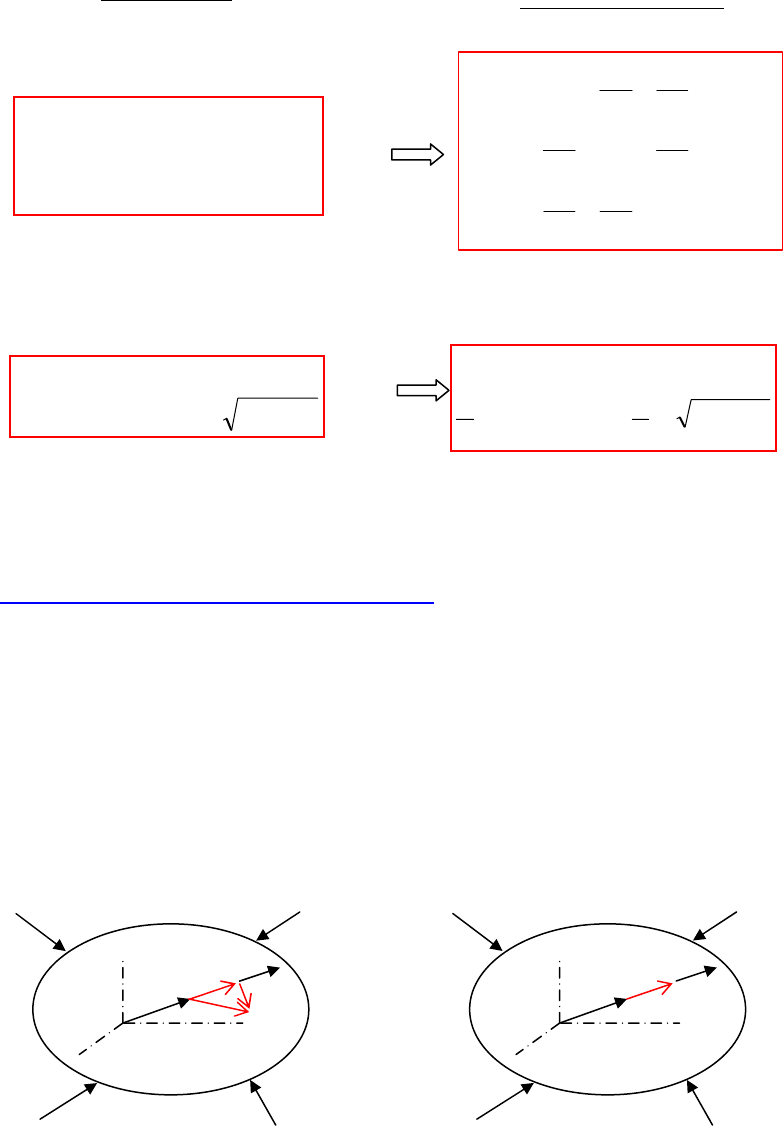
Para obtener el valor de la deformación unitaria δ calcularemos y sumaremos los
correspondientes desplazamientos sufridos por el punto D
o
debidos a las deformaciones
longitudinales y angulares unitarias dadas, correspondientes al punto O: ε
x
, ε
y
, ε
z
, γ
xy
,
γ
yz
, γ
zx
.
• Desplazamiento δ debido a las deformaciones longitudinales: ε
x
, ε
y
, ε
z
,
O
x
z
Fig. 2.8
1
D
o
´
cos
β
u
cos
α
cos
γ
y
ε
y
.cos
β
δ
cos
β
ε
x
.cos
α
cos
α
ε
z
.cos
γ
cos
γ
O
x
z
Fig. 2.9
γ
ε
δ
β
ε
δ
α
ε
δ
cos.cos.cos.
zzyyxx
=
=
=
Sección 2.3: Estado de deformaciones en un punto
7
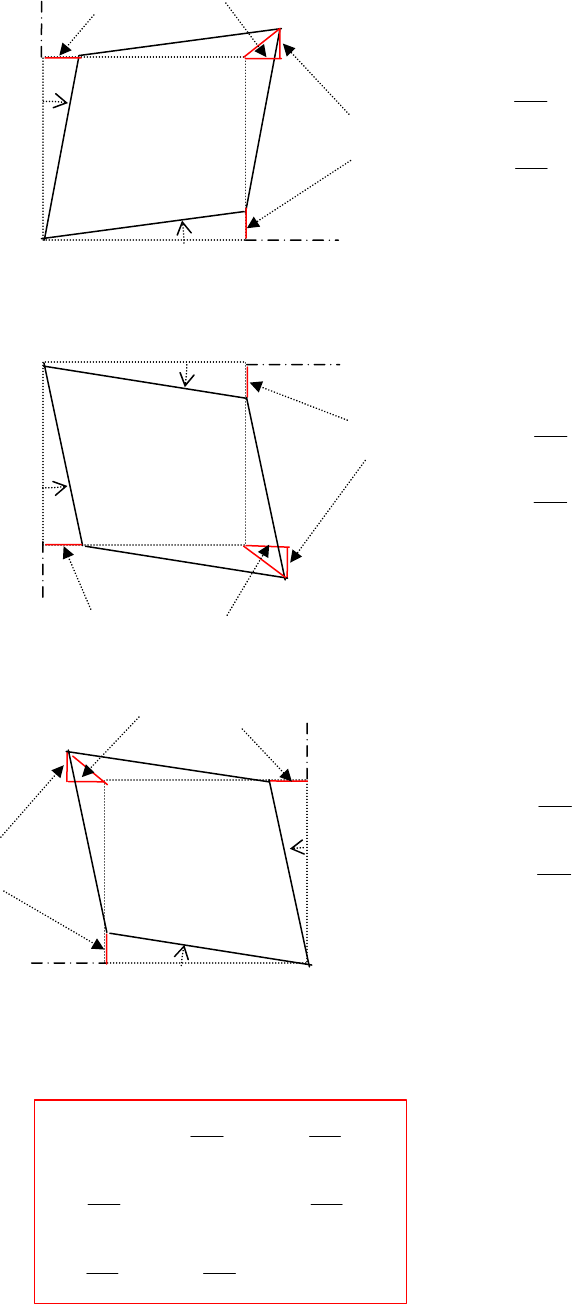
• Desplazamiento δ debido a las deformaciones angulares: γ
xy
, γ
yz
, γ
zx
.
(
γ
yx
/2).cosβ
Sumando finalmente todos los desplazamientos δ obtenidos quedaría:
δ
(
γ
xy
/2).cos
α
y
cos α
cos
β
O
x
γ
yx
/2
α
γ
δ
β
γ
δ
cos.
2
cos.
2
xy
y
yx
x
=
=
γ
xy
/2
cos α
O
δ
(
γ
xz
/2).cos
α
(
γ
zx
/2).cos
γ
x
γ
xz
/2
cos
γ
z
γ
zx
/2
α
γ
δ
γ
γ
δ
cos.
2
cos.
2
xz
z
zx
x
=
=
(
γ
yz
/2).cos
β
δ
(
γ
zy
/2).cos
γ
cos
β
cos
γ
O
z
γ
zy
/2
γ
yz
/2
y
β
γ
δ
γ
γ
δ
cos.
2
cos.
2
yz
z
zy
y
=
=
Fig. 2.10.a), b), c)
γεβ
γ
α
γ
δ
γ
γ
βεα
γ
δ
γ
γ
β
γ
αεδ
cos.cos.
2
cos.
2
cos.
2
cos.cos.
2
cos.
2
cos.
2
cos.
z
yz
xz
z
zy
y
xy
y
zx
yx
xx
++=
++=
++=
(2.3)
Tema 2: Deformaciones
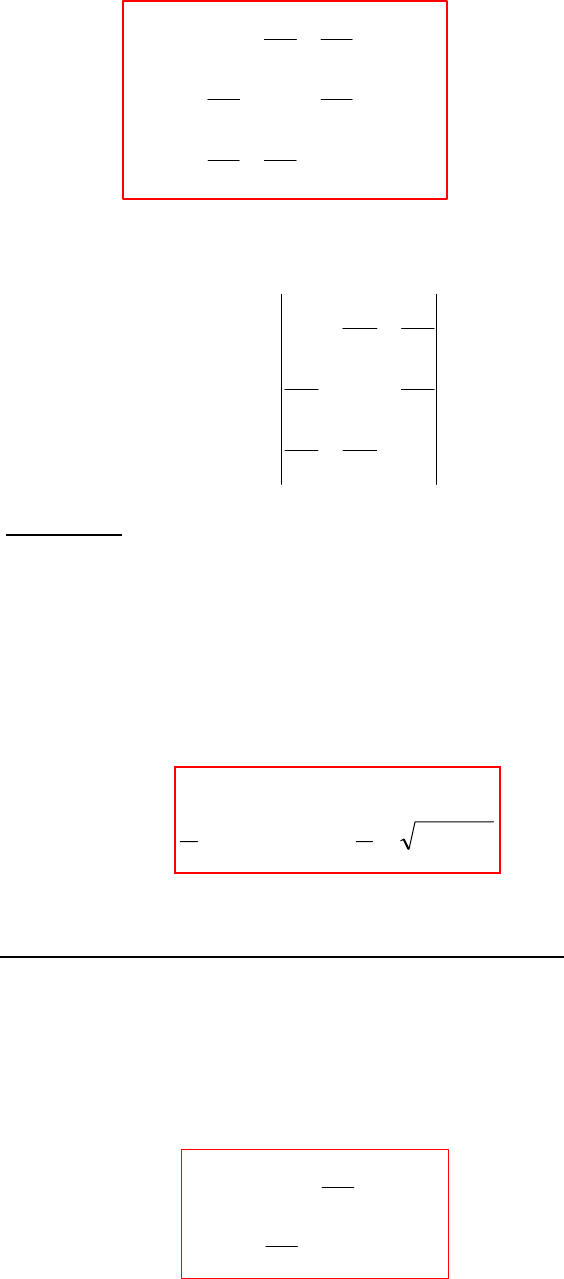
Poniendo las ecuaciones (2.3) en forma matricial, sería:
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
=
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
γ
β
α
ε
γ
γ
γ
ε
γ
γ
γ
ε
δ
δ
δ
cos
cos
cos
.
22
22
22
z
yz
xz
zy
y
xy
zx
yx
x
z
y
x
(2.4)
r
=
δ
uD
r
.
y en forma abreviada:
(2.5)
siendo:
""
22
22
22
nesDeformaciodeTensorD
z
yz
xz
zy
y
xy
zx
yx
x
ε
γ
γ
γ
ε
γ
γ
γ
ε
=
Conclusión:
Conocidas las componentes del Estado de Deformaciones en un punto O:
ε
x
, ε
y
, ε
z
,
γ
xy
,
γ
yz
, γ
zx
y dada una dirección OD cualquiera, definida por su vector unitario:
u (cosα, cosβ, cosγ ), se podrá conocer, por la ecuación obtenida (2.4), la deformación δ
en dicha dirección.
Una vez conocida la deformación
δ, se podrá obtener ε y γ
/2, (ver fig.2.6):
22
22
..
εδ
γ
εδ
γ
εεδε
−=−=
==
r
r
r
r
r
r
r
uu
)6.2(
CASO PARTICULAR: DEFORMACIONES PLANAS
Se considera un estado de deformaciones planas cuando se cumpla:
0,0,0
=
==
yzxzz
γ
γ
ε
La ecuación matricial (2.4) se verá reducida a:
⎥
⎦
⎤
⎢
⎣
⎡
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
=
⎥
⎦
⎤
⎢
⎣
⎡
β
α
ε
γ
γ
ε
δ
δ
cos
cos
.
2
2
y
xy
yx
x
y
x
)7.2(
8
Sección 2.3: Estado de deformaciones en un punto
9
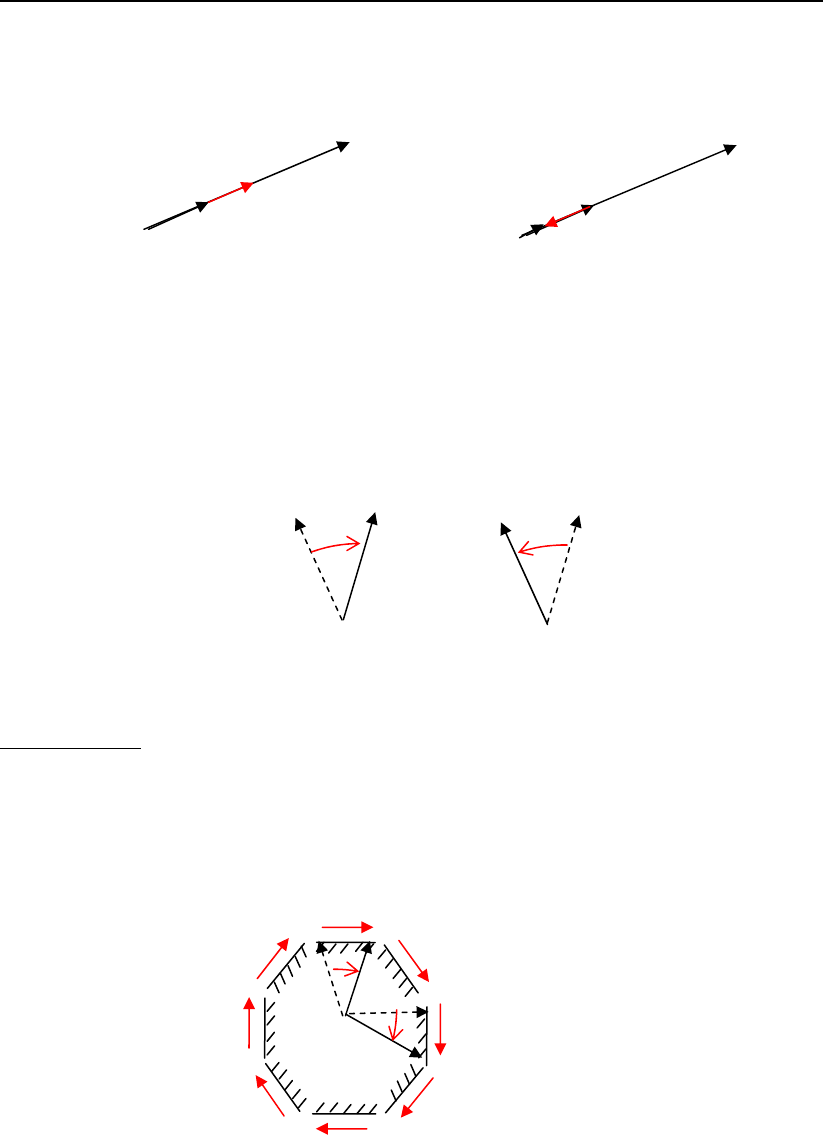
onvenios de signos para las deformacionesC
Para las deformaciones longitudinales:
ε → se consideran positivas, (ε > 0), cuando
ara las deformaciones angulares:
γ → se consideran positivas, (γ > 0), cuando
o mismo sería con γ
xz
y γ
yz
bservaciones: Analogías entre el Estado de Tensiones y el Estado de
expresen alargamientos (negativas en caso contrario)
ε < 0
O
D
D
o
ε > 0
O
D
D
o
1 D
o
´
1
D ´
o
el vector unitario OD
o
, en la direcció
el vector unitario OD
o
, en la dirección OD,
n OD,
P
indiquen una disminución del ángulo recto inicial que forman las aristas del
paralelepípedo que están en los ejes coordenados (negativas en caso contrario)
L
O
deformaciones
Vistas las analogías entre el Estado de Tensiones y el Estado de Deformaciones, se
obtendrán a 2 sobre
n efecto:
podrá concluir que si se en todas las ecuaciones obtenidas en el Tema 1 sobre
Tensiones, se hacen los siguientes cambios:
se las ecuaciones equivalentes correspondientes al Tem
Deformaciones.
E
se alarga y pasa a OD
o
´
se acorta y pasa a OD
o
´
O
A
O
A
B
A´
´ B
γ
yx
/2
γ
xy
/2
γ
xy
> 0
y
γ
yx
/2
x
B
A
B´
´
γ
xy
/2
γ
xy
< 0
x
y
Fig. 2.12
2
γ
τεσδρ
→→→
r
r
r
r
r
Fig. 2.11
Tema 2: Deformaciones
10
.4.- DEFORMACIONES PRINCIPALES
2
De las infinitas Deformaciones que puede haber en un punto O de un sólido, relativas a
currirá pues igual que con las tensiones, que en las direcciones principales se cumplirá
⎤⎡
⎤⎡
⎤⎡
αττσρ
cos
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎢
⎢
⎢
⎢
⎢
⎢
⎣
=
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
γ
β
α
ε
γ
γ
γ
ε
γ
ε
δ
δ
δ
cos
cos
cos
.
22
22
22
z
yz
xz
zy
y
xy
zx
yx
x
z
y
x
⎤
⎡
γ
γ
⎥
⎥
⎥
⎦
⎢
⎢
⎢
⎣
⎥
⎥
⎥
⎦
⎢
⎢
⎢
⎣
=
⎥
⎥
⎥
⎦
⎢
⎢
⎢
⎣
γ
β
σττ
τστ
ρ
ρ
cos
cos.
zyzxz
zyyxy
zxyxx
z
y
x
(1 9).
TENSIONES
DEFORMACIONES
(2.4)
22
22
..
εδ
γ
εδ
γ
εεδε
−=−=
==
r
r
r
r
r
r
r
uu
22
..
σρτσρτ
σ
σ
ρ
σ
−=−=
=
=
r
r
r
rrr
r
uu
)6.2(
(1.12)
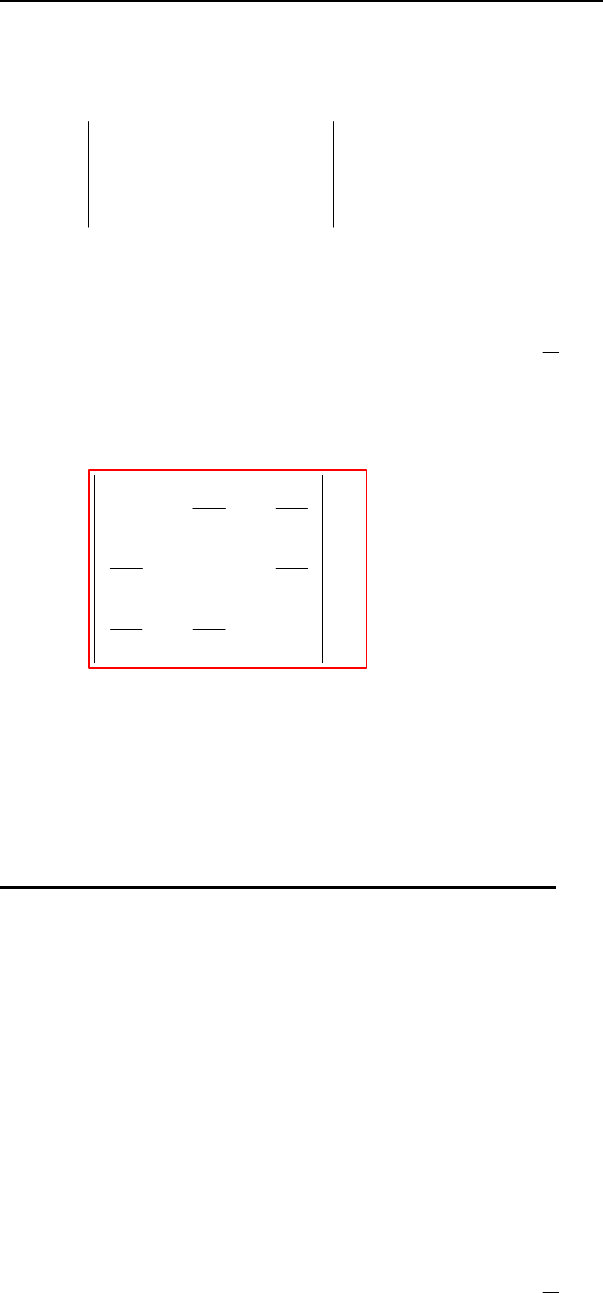
las infinitas direcciones OD que se puedan considerar, habrá unas que tengan los
valores máximo y mínimo a las que se denominará:
DEFORMACIONES
PRINCIPALES. A las direcciones correspondientes en la que eso ocurre, se las
denominará : DIRECCIONES PRINCIPALES.
O
que: γ / 2 = 0 y por tanto: δ = ε.
O
D
D
o
1
x
y
z
ε
δ
γ
/2
F
1
F
2
F
3
F
n
OD: dirección
O
D
D
o
1
x
y
z
ε =
δ
γ
/2 = 0
F
1
F
2
F
3
F
n
OD: dirección
principal
Fig. 2.13
cualquiera
Sección 2.4: Deformaciones Principales
CÁLCULO DE LAS DEFORMACIONES PRINCIPALES
En el tema de Tensiones las ecuaciones 1.16, nos permitían calcular las tensiones
principales:
33
22
11
σρ
σρ
σ
ρ
=
=
=
0=
−
−
−
ρσττ
τρστ
ττρσ
zyzxz
zyyxy
zxyxx
→
Las ecuaciones correspondientes para calcular las Deformaciones Principales, se
obtendrán, por lo dicho antes, haciendo los cambios:
2
γ
τεσδρ
→→→
r
r
r
r
r
y quedarán las ecuaciones:
0
22
22
22
=
−
−
−
δε
γ
γ
γ
δε
γ
γ
γ
δε
z
yz
xz
zy
y
xy
zx
yx
x
(2.8)
Resolviendo este determinante, que da lugar a una ecuación de tercer grado, se
obtendrán las
Deformaciones Principales : δ
1
, δ
2
, δ
3
y se cumplirá: δ
1
= ε
1
, δ
2
= ε
2
, δ
3
= ε
3
CÁLCULO DE LAS DIRECCIONES PRINCIPALES
En el tema 1 relativo a las tensiones, el cálculo de las Direcciones Principales venían
dadas por las ecuaciones 1.17.a y b.:
0cos).(cos.cos.
0cos.cos).(cos.
0cos.cos.cos).(
=−++
=+−+
=
+
+−
iiziyzixz
izyiiyixy
izxiyxiix
γρσβτατ
γτβρσατ
γ
τ
β
τ
α
ρ
σ
1coscoscos
222
=++
iii
γβα
Pues bien, haciendo nuevamente los cambios:
2
γ
τεσδρ
→→→
r
r
r
r
r
11
Tema 2: Deformaciones
obtendremos las Direcciones Principales correspondientes a las Deformaciones
Principales y serán:
0cos).(cos.
2
cos.
2
0cos.
2
cos).(cos.
2
0cos.
2
cos.
2
cos).(
=−++
=+−+
=++−
iizi
yz
i
xz
i
zy
iiyi
xy
i
zx
i
yx
iix
γδεβ
γ
α
γ
γ
γ
βδεα
γ
γ
γ
β
γ
αδε
(2.9.a)
(2.9.b)
1coscoscos
222
=++
iii
γβα
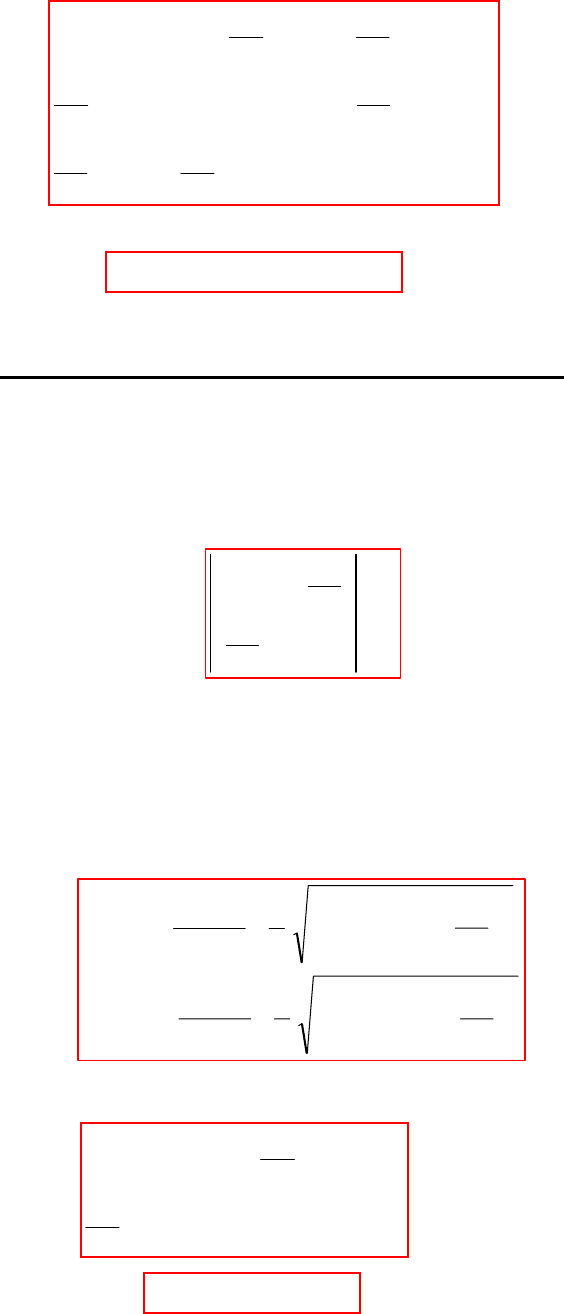
CASO PARTICULAR: DEFORMACIONES PLANAS
Para el caso particular de deformaciones planas:
,
0,0,0 =
=
=
yzxzz
γ
γ
ε
La ecuación para el cálculo de las
Deformaciones Principales (2.8) quedaría reducida a
:
0
2
2
=
−
−
δε
γ
γ
δε
y
xy
yx
x
(2.10)
Resolviendo este determinante, que da lugar a una ecuación de segundo grado se
tendrán las
Deformaciones Principales : δ
1
, δ
2
y se cumplirá: δ
1
= ε
1
, δ
2
= ε
2
Si aplicamos la fórmula de resolución de la ecuación de 2º grado, se obtendrían:
12
Por
su parte las
Direcciones Principales se obtendrán de:
()
()
2
2
22
2
2
11
2
.4.
2
1
2
2
.4.
2
1
2
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+−−
+
==
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+−+
+
==
xy
yx
yx
xy
yx
yx
γ
εε
εε
εδ
γ
εε
εε
εδ
(2.11)
0cos).(cos.
2
0cos.
2
cos).(
=−+
=+−
iiyi
xy
i
yx
iix
βδεα
γ
β
γ
αδε
(2.12.a)
(2.12.b)
1coscos
22
=+
ii
βα
Sección 2.5: Representación de Mohr
2.5.- REPRESENTACIÓN DE MOHR
Al igual que en el caso de las Tensiones, podremos desarrollar también un método
gráfico para el cálculo de las deformaciones
CASO PARTICULAR: DEFORMACIONES PLANAS
Supongamos conocidas las tres componentes del estado de deformaciones plano en un
punto O: ε
x
, ε
y
,
γ
xy
, y se quieren calcular, gráficamente, las deformaciones: ε y γ/2
correspondientes en una dirección cualquiera OD, definida por su vector unitario:
u (cos
α, cosβ)
y
D
β
= 90-α
D´
13
Se sabe, por lo visto en 2.3., que para cada dirección OD se obtendrían por las
ecuaciones analíticas (2.7) y (2.6), un par de valores: ε y γ/2. Así:
Si representásemos estos valores obtenidos en unos ejes coordenados, en los que en el
eje de abcisas llevásemos las deformaciones longitudinales (ε) y en el de ordenadas, las
deformaciones angulares (γ/2) y uniésemos todos ellos, se demuestra, no lo haremos,
que el lugar geométrico de los mismos es una circunferencia, a la que denominaremos
“
Circunferencia de Mohr”
D
o
ε
γ
/2
δ
u
D
o
´
x
O
β
α
Fig. 2.14
11
22
para dirección , / 2
para dirección , / 2
.............................................................................
para dirección , / 2
nn
OD
OD
OD
11
22
nn
α
αε
αα εγ
αα εγ
=→ →
=→ →
=→ →
γ
(
ε
2
,
γ
2
/2
γ
/2
ε
O
(
ε
1
,
γ
1
/2
)
(
ε
n
,
γ
n
/2
)
Fig. 2.15
Tema 2: Deformaciones
Criterios de signos para las deformaciones, al utilizar el método gráfico de Mohr
• Deformaciones longitudinales (ε): se consideran positivas las deformaciones
longitudinales cuando indican un alargamiento. Negativas en caso contrario.
D
D
ε > 0
ε < 0
14
•
Deformaciones angulares (
γ/2): se consideran positivas cuando impliquen un
giro en sentido horario. Negativas en caso contrario.
Observaciones
:
Como las tensiones cortantes (τ) son las que producen las deformaciones angulares
(γ/2), se observa por lo visto en la sección 1.5 del tema de Tensiones, que hay
coherencia con los criterios de signos dados para las tensiones cortantes y el dado ahora
para las deformaciones angulares: τ > 0 → γ/2 > 0
Los criterios de signos utilizados para las deformaciones angulares, en la representación
gráfica de Mohr, no coinciden con los dados en 2.3. para la resolución analítica. Este
hecho habrá de tenerse siempre en cuenta en la resolución de los problemas.
O
D
o
1 D
o
´
D
o
O
1
D
o
´
Fig. 2.16
γ
/2 > 0
γ
/2 < 0
D
D´
O
D´
D
O
Fig. 2.17
τ
τ
τ
τ
τ
> 0 →
γ
/2 > 0
τ
τ
τ
τ
Fi
g
.2.18
Sección 2.5: Representación de Mohr
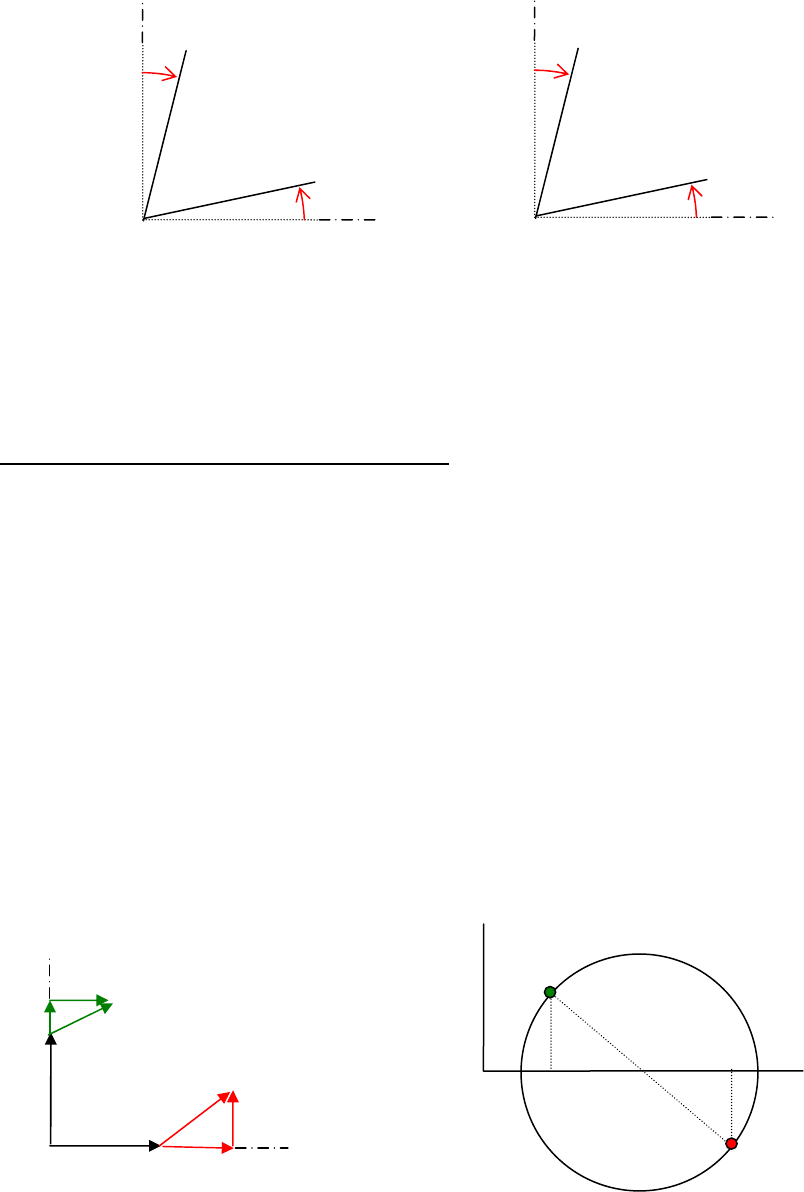
15
:
onstrucción de la circunferencia de Mohr:
Ejemplo
y
y
C
Supónganse conocidas las componentes del estado de deformaciones plano en un punto
maciones
as deformaciones relativas al eje X ( ε
x
> 0, γ
xy
/2 < 0, por criterios de signos de Mohr),
O: ε
x
, ε
y
, γ
xy
. (Fig.2.20.a) y tracemos unos ejes coordenados en donde en el eje de
abcisas llevaremos las deformaciones longitudinales unitarias (ε) y en el de ordenadas
las deformaciones angulares simétricas (γ/2).
La construcción de la Circunferencia de Mohr relativa a dicho estado de Defor
se hará de una forma similar a como se construyó la Circunferencia de Mohr relativa a
las Tensiones
L
estarán representadas en los ejes coordenados por el punto X. A su vez, las
deformaciones correspondientes al eje Y ( ε
y
> 0, γ
yx
/2 > 0, por criterios de signos de
Mohr), estarán representadas en los ejes coordenados por el punto Y. Si unimos, con
una recta, los puntos X e Y, la intersección de ésta con el eje de abcisas (punto C), será
el centro de la circunferencia de Mohr. (Fig.2.20.b)
O
Y
1
ε
x
ε
y
X
1
γ
xy
/2
γ
yx
/2
δ
x
δ
y
u
x
u
y
O
A
B
A´
B´
γ
yx
/2 > 0
γ
xy
/2 > 0
γ
xy
> 0
x
Criterio de signos para la
resolución analítica
O
A
B
B´
γ
yx
/2 > 0
A´
γ
xy
/2 < 0
x
Criterio de signos para la
resolución gráfica (Mohr)
Fig. 2.19
O
C
X
Y
ε
γ
/2
ε
x
ε
y
γ
yx
/2
Fi
D
E
γ
xy
/2
g
.2.20.a Fi
g
.2.20.b.
Este documento contiene más páginas...
Descargar Completo
02_Deformaciones.PDF
 Estamos procesando este archivo...
Estamos procesando este archivo...
 Lamentablemente la previsualización de este archivo no está disponible. De todas maneras puedes descargarlo y ver si te es útil.
Lamentablemente la previsualización de este archivo no está disponible. De todas maneras puedes descargarlo y ver si te es útil.
Descargar
Estamos procesando este archivo...
Lamentablemente la previsualización de este archivo no está disponible. De todas maneras puedes descargarlo y ver si te es útil.